
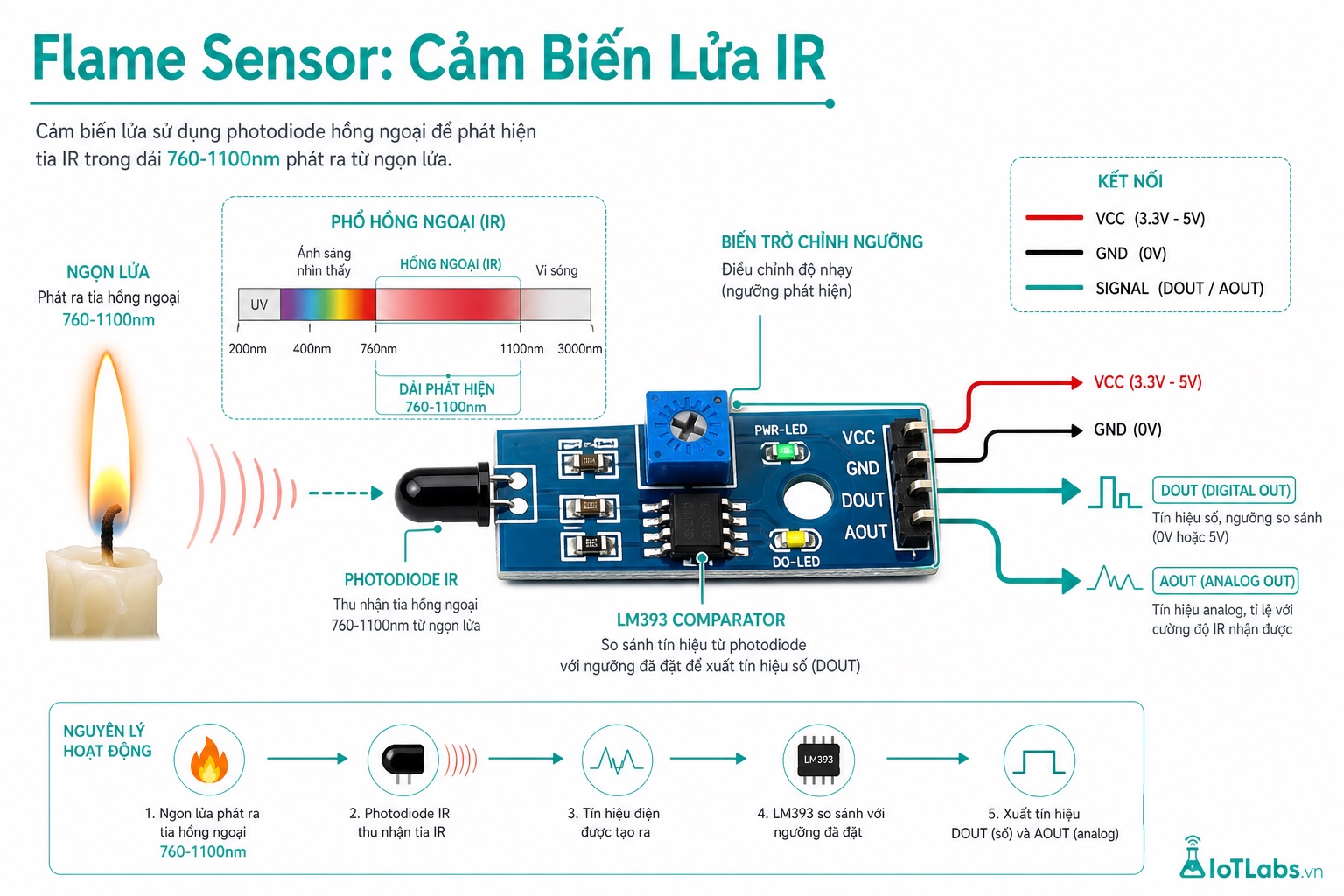
Flame Sensor (cảm biến lửa) phát hiện ngọn lửa bằng cách nhận bức xạ hồng ngoại đặc trưng của lửa ở phổ 760–1100nm. Tương tự IR sensor thông thường nhưng được chọn lọc theo phổ của ngọn lửa, không phải LED IR. Bài này phân tích nguyên lý, giải thích tại sao nắng cũng có thể gây nhiễu, và code robot chữa cháy cạnh tranh.
Nguyên Lý Hoạt Động
1. Lửa Và Phổ Bức Xạ IR
Ngọn lửa (đặc biệt từ hydrocarbon như cồn, nến, LPG) phát ra bức xạ điện từ trên dải rộng, đặc biệt mạnh ở vùng IR gần (Near-IR: 700–1100nm) và có đỉnh đặc trưng.
Phổ bức xạ ngọn lửa hydrocarbon (ví dụ cồn):
↑ Cường độ
│
Visible │ Near-IR
────────── │ ──────────────────
400-700nm │ 700-1100nm
│ ██
│ ██████
│ ██████████
│ ████████████████
├────────────────────→ Bước sóng (nm)
700 940 1100
Đỉnh đặc trưng: ~4.4µm (mid-IR, từ CO₂) và ~2.7µm (từ H₂O)
→ nhưng module rẻ tiền không phát hiện mid-IR
→ phát hiện qua near-IR 760-1100nm (phổ phát xạ nóng đỏ/vàng)Điểm khác biệt với ánh sáng thông thường:
- Đèn LED/huỳnh quang: phát nhiều visible, ít near-IR
- Bóng đèn sợi đốt (halogen): phát near-IR mạnh → có thể gây nhiễu
- Ánh sáng mặt trời: phổ rộng bao gồm near-IR → nhiễu lớn nhất
- Ngọn lửa: phổ liên tục + phát xạ blackbody theo nhiệt độ (~1000-2000K) → very strong near-IR
2. Photodiode Nhạy Phổ 760-1100nm
Photodiode trong flame sensor được chọn lọc (với lớp filter hoặc vật liệu bán dẫn) để nhạy nhất trong khoảng 760–1100nm — bao gồm vùng near-IR mà ngọn lửa phát mạnh.
Ngọn lửa cồn/nến/LPG
↓ IR bức xạ 760-1100nm
[Flame Sensor Photodiode]
↓
Dòng quang điện tỷ lệ với cường độ IR nhận được
↓
Điện trở/điện áp thay đổi
↓
LM393 so sánh với ngưỡng
↓
OUT thay đổiTại sao 760-1100nm thay vì 940nm đơn thuần: Ngọn lửa phát phổ rộng (blackbody radiation), không phải dải hẹp như LED IR. Photodiode nhạy với dải rộng hơn → bắt được nhiều bức xạ từ ngọn lửa → nhạy hơn. Tuy nhiên, điều này cũng có nghĩa dễ nhiễu từ các nguồn sáng khác phát near-IR.
3. Module — LM393 + Triết Áp
Cấu trúc module tương tự IR obstacle và rain sensor:
VCC
│
[R pull-up]
│
├──── AOUT (analog — điện áp giảm khi phát hiện lửa)
│
[Photodiode]
│
GND
AOUT → LM393 (+)
Triết áp → LM393 (-) (ngưỡng)
LM393 OUT → DOUTOutput logic:
- Không lửa: Photodiode không nhận nhiều IR → AOUT cao → DOUT HIGH
- Có lửa: Photodiode nhận nhiều IR → AOUT thấp → DOUT LOW (active LOW)
Triết áp: Điều chỉnh ngưỡng cảm nhận — vặn theo chiều kim đồng hồ để tăng ngưỡng (ít nhạy hơn, cần nhiều IR hơn mới trigger).
4. Góc Phát Hiện — 60° Thông Thường
Flame sensor thông thường có góc phát hiện ~60° (tổng).
Flame Sensor
│ ──── 30° ────┐
│ Phát hiện được
│ ──── 30° ────┘
Ngọn lửa ở trực tiếp trước: phát hiện rõ nhất
Ngọn lửa ở góc 45°: phát hiện yếu hơn
Ngọn lửa ở góc >60°: không phát hiệnHệ thống 3-sensor hoặc 5-sensor: Đặt nhiều sensor ở các góc khác nhau để phủ 180° hoặc 360° — dùng trong robot chữa cháy cạnh tranh để xác định hướng ngọn lửa.
Thông Số Kỹ Thuật
| Thông số | Giá trị |
|---|---|
| Điện áp hoạt động | 3.3V – 5V |
| Dòng tiêu thụ | ~15–20mA |
| Bước sóng nhạy | 760nm – 1100nm |
| Khoảng cách phát hiện | Lửa nến: ~80cm; Bật lửa: ~20cm (tùy cường độ) |
| Góc phát hiện | ~60° |
| Ngõ ra analog | 0V – VCC (thấp = có lửa) |
| Ngõ ra digital | LOW khi lửa, HIGH khi không (active LOW) |
| Comparator | LM393 |
Lưu ý khoảng cách: Ngọn lửa nến (nhỏ) phát hiện đến ~80cm. Ngọn lửa lớn hơn phát hiện xa hơn. Khoảng cách cũng phụ thuộc điều chỉnh triết áp.
Sơ Đồ Chân (Pinout)
[Photodiode]
┌──────────────────┐
│ Flame Sensor │
│ [Triết áp] │
│ [LED báo] │
│ LM393 │
└──────────────────┘
VCC GND DOUT AOUT| Chân | Chức năng |
|---|---|
| VCC | 3.3V – 5V |
| GND | Đất |
| DOUT | Digital: LOW = lửa, HIGH = không (active LOW) |
| AOUT | Analog: điện áp thấp = nhiều IR = có lửa |
So Sánh Các Loại Flame Sensor
| Loại | Sensor | Số sensor | Góc phủ |
|---|---|---|---|
| 1-sensor module | 1 photodiode | 1 | 60° |
| 3-sensor module | 3 photodiode | 3 | ~120° |
| 5-sensor module | 5 photodiode | 5 | ~180° |
| MLX90614 | Thermopile IR | 1 | Đo nhiệt độ từ xa — khác loại |
3/5-sensor module dùng trong: Robot chữa cháy cạnh tranh — xác định hướng ngọn lửa từ sự khác biệt giữa các sensor.
Kết Nối Phần Cứng
Kết Nối với ESP32 DevKit V1
ESP32 DevKit V1 Flame Sensor Module
───────────────────── ────────────────────────
3V3 ─────────────────→ VCC
GND ─────────────────→ GND
GPIO4 (Input) ←────────── DOUT (active LOW)
GPIO32 (ADC1) ←────────── AOUT (analog)Cấp 3.3V: an toàn cho GPIO ESP32. DOUT output 3.3V HIGH, 0V LOW.
Kết Nối với Arduino Uno
Arduino Uno Flame Sensor Module
───────────────────── ────────────────────────
5V ─────────────────→ VCC
GND ─────────────────→ GND
Pin 7 (Input) ←────────── DOUT
A0 (Analog) ←──────────── AOUTCode Arduino IDE
Code Phát Hiện Lửa Đơn Giản — Arduino Uno
/*
* Flame Sensor — Phát hiện ngọn lửa
* Board: Arduino Uno
* Kết nối: VCC→5V, GND→GND, DOUT→Pin7, AOUT→A0
*
* QUAN TRỌNG: Điều chỉnh triết áp module để đặt ngưỡng nhạy
* Test: Dùng bật lửa (giữ cách ~20cm) để kiểm tra
* KHÔNG đưa lửa thật gần module — photodiode có thể hỏng nếu quá nóng
*/
const int DIGITAL_PIN = 7;
const int ANALOG_PIN = A0;
void setup() {
Serial.begin(9600);
pinMode(DIGITAL_PIN, INPUT);
Serial.println("=== Flame Sensor - Arduino Uno ===");
Serial.println("DOUT LOW = Phát hiện lửa (active LOW)");
}
void loop() {
// Đọc digital — LOW = có lửa
bool flameDetected = (digitalRead(DIGITAL_PIN) == LOW);
// Đọc analog — thấp = nhiều IR = có lửa
int analogValue = analogRead(ANALOG_PIN);
// Phân loại mức độ từ analog
String flameLevel;
if (analogValue > 900) flameLevel = "Không có lửa";
else if (analogValue > 700) flameLevel = "IR yếu (có thể nhiễu nắng)";
else if (analogValue > 400) flameLevel = "Lửa yếu / xa";
else flameLevel = "LỬA! Phát hiện rõ";
// In kết quả
Serial.print("Digital: ");
Serial.print(flameDetected ? "CÓ LỬA! " : "Bình thường ");
Serial.print("| Analog: "); Serial.print(analogValue);
Serial.print(" | Mức: "); Serial.println(flameLevel);
// Cảnh báo khi phát hiện
if (flameDetected) {
// Thêm: bật còi buzzer, relay bơm nước, gửi cảnh báo...
Serial.println("!!! CẢNH BÁO LỬA !!!");
}
delay(500);
}Code Robot Chữa Cháy — Arduino Uno (3 Flame Sensor)
/*
* Robot Chữa Cháy — 3 Flame Sensor xác định hướng lửa
* Board: Arduino Uno
* Kết nối:
* Sensor trái DOUT → Pin 4
* Sensor giữa DOUT → Pin 5
* Sensor phải DOUT → Pin 6
* Motor L298N: ENA→Pin9, IN1→Pin2, IN2→Pin3, ENB→Pin10, IN3→Pin7, IN4→Pin8
* Quạt/bơm → Pin 11 (bật khi gần lửa)
*
* Logic: Tìm hướng lửa → di chuyển về phía lửa → khi gần (cả 3 sensor thấy) → chữa cháy
*/
const int FLAME_L = 4; // Sensor lửa trái
const int FLAME_M = 5; // Sensor lửa giữa
const int FLAME_R = 6; // Sensor lửa phải
const int FAN_PIN = 11; // Quạt / bơm chữa cháy
// Motor L298N
const int ENA = 9, IN1 = 2, IN2 = 3;
const int ENB = 10, IN3 = 7, IN4 = 8;
const int SPEED = 180; // Tốc độ bình thường
const int SLOW = 100; // Tốc độ chậm khi tiếp cận
void motorCtrl(int leftSpeed, int rightSpeed) {
analogWrite(ENA, abs(leftSpeed));
digitalWrite(IN1, leftSpeed > 0 ? HIGH : LOW);
digitalWrite(IN2, leftSpeed > 0 ? LOW : HIGH);
analogWrite(ENB, abs(rightSpeed));
digitalWrite(IN3, rightSpeed > 0 ? HIGH : LOW);
digitalWrite(IN4, rightSpeed > 0 ? LOW : HIGH);
}
void setup() {
Serial.begin(9600);
pinMode(FLAME_L, INPUT);
pinMode(FLAME_M, INPUT);
pinMode(FLAME_R, INPUT);
pinMode(FAN_PIN, OUTPUT);
for (int p : {ENA, IN1, IN2, ENB, IN3, IN4}) pinMode(p, OUTPUT);
digitalWrite(FAN_PIN, LOW); // Quạt tắt ban đầu
Serial.println("=== Fire Fighting Robot ===");
}
void loop() {
// DOUT LOW = thấy lửa (active LOW)
bool fL = (digitalRead(FLAME_L) == LOW);
bool fM = (digitalRead(FLAME_M) == LOW);
bool fR = (digitalRead(FLAME_R) == LOW);
Serial.printf("L:%d M:%d R:%d → ", fL, fM, fR);
if (fL && fM && fR) {
// Cả 3 sensor thấy lửa → đang gần lửa → CHỮA CHÁY!
motorCtrl(0, 0); // Dừng
digitalWrite(FAN_PIN, HIGH); // Bật quạt/bơm
Serial.println("CHỮA CHÁY!");
delay(3000); // Chữa cháy 3 giây
digitalWrite(FAN_PIN, LOW);
} else if (fM && !fL && !fR) {
// Chỉ sensor giữa thấy → thẳng về phía lửa
motorCtrl(SLOW, SLOW);
Serial.println("Tiến vào lửa");
} else if (fL && !fR) {
// Lửa bên trái → quay trái
motorCtrl(-SLOW, SLOW);
Serial.println("Quay trái tìm lửa");
} else if (fR && !fL) {
// Lửa bên phải → quay phải
motorCtrl(SLOW, -SLOW);
Serial.println("Quay phải tìm lửa");
} else {
// Không thấy lửa → tìm kiếm (quay chậm)
motorCtrl(-SLOW, SLOW);
Serial.println("Tìm kiếm lửa...");
}
delay(100);
}Code ESP32 — Flame Detection + Cảnh Báo Serial
/*
* Flame Sensor — ESP32, đọc analog + digital, phân mức
* Board: ESP32 DevKit V1
* Kết nối: VCC→3V3, GND→GND, DOUT→GPIO4, AOUT→GPIO32
*/
const int DIGITAL_PIN = 4;
const int ANALOG_PIN = 32; // ADC1_CH4
void setup() {
Serial.begin(115200);
pinMode(DIGITAL_PIN, INPUT);
analogSetAttenuation(ADC_11db); // Đọc 0-3.3V
analogReadResolution(12); // 12-bit: 0-4095
Serial.println("=== Flame Sensor - ESP32 ===");
}
String getFlameLevel(int raw) {
// ESP32 ADC 12-bit, 3.3V ref
// Analog THẤP = nhiều IR = có lửa
if (raw > 3500) return "Không có lửa";
if (raw > 2500) return "IR mờ (nắng/đèn ?)";
if (raw > 1500) return "Lửa yếu / xa";
if (raw > 800) return "Lửa gần!";
return "LỬA RẤT GẦN!";
}
void loop() {
bool flameDet = (digitalRead(DIGITAL_PIN) == LOW);
int analogVal = analogRead(ANALOG_PIN);
Serial.printf("ADC: %4d | Mức: %-20s | DOUT: %s\n",
analogVal,
getFlameLevel(analogVal).c_str(),
flameDet ? "CÓ LỬA!" : "OK"
);
if (flameDet) {
// Thêm: bật relay, gửi MQTT, còi...
Serial.println(">>> PHÁT HIỆN LỬA! <<<");
}
delay(300);
}Kết Quả Mong Đợi
=== Flame Sensor - ESP32 ===
ADC: 3820 | Mức: Không có lửa | DOUT: OK
ADC: 3810 | Mức: Không có lửa | DOUT: OK
[Đưa bật lửa lại gần ~30cm]
ADC: 2100 | Mức: Lửa yếu / xa | DOUT: OK
ADC: 950 | Mức: Lửa gần! | DOUT: CÓ LỬA!
>>> PHÁT HIỆN LỬA! <<<
ADC: 430 | Mức: LỬA RẤT GẦN! | DOUT: CÓ LỬA!Ứng Dụng Thực Tế
| Ứng dụng | Chi tiết |
|---|---|
| Robot chữa cháy cạnh tranh | 3–5 sensor xác định hướng, servo/quạt chữa cháy |
| Phát hiện lửa bếp để lộ | Cảnh báo khi bếp gas bị lửa bùng lớn |
| Hệ thống tắt gas tự động | Phát hiện lửa bất thường → relay đóng van gas |
| Phát hiện cháy rừng sớm | Nhiều sensor kết hợp LoRa (hạn chế — ảnh hưởng nắng) |
Lưu Ý Khi Sử Dụng
1. Ánh sáng mặt trời và đèn halogen gây nhiễu
Cả hai phát near-IR mạnh → sensor có thể báo lửa giả. Không triển khai ngoài trời có nắng. Trong nhà: tránh đặt gần cửa sổ ánh nắng trực tiếp hoặc đèn halogen chiếu thẳng vào sensor.
2. DOUT active LOW — logic đảo
DOUT LOW = có lửa. Tương tự rain sensor và IR obstacle. Dùng if (digitalRead(PIN) == LOW) để phát hiện lửa. LED báo trên module sáng khi DOUT LOW (có lửa) — dùng để test nhanh.
3. Không đưa ngọn lửa quá gần sensor
Khoảng cách tốt nhất để test: 10–40cm. Quá gần → nhiệt cao có thể làm hỏng photodiode hoặc vỏ nhựa. KHÔNG đốt module.
4. Điều chỉnh triết áp theo môi trường thực tế
Môi trường có nhiều IR (nắng lọt vào) → giảm độ nhạy (vặn ngược chiều kim đồng hồ). Môi trường tối, cần phát hiện lửa nhỏ → tăng độ nhạy (vặn theo chiều kim đồng hồ). Không có cài đặt cố định “đúng” — tùy môi trường.
5. Không thay thế được cảm biến khói/nhiệt tiêu chuẩn
Module này không đạt tiêu chuẩn an toàn cháy nổ. Không dùng thay thế detector khói/nhiệt chính thống trong công trình. Chỉ dùng cho dự án hobbyist, robot cạnh tranh, và thử nghiệm.