
điều khiển không dây robot
-
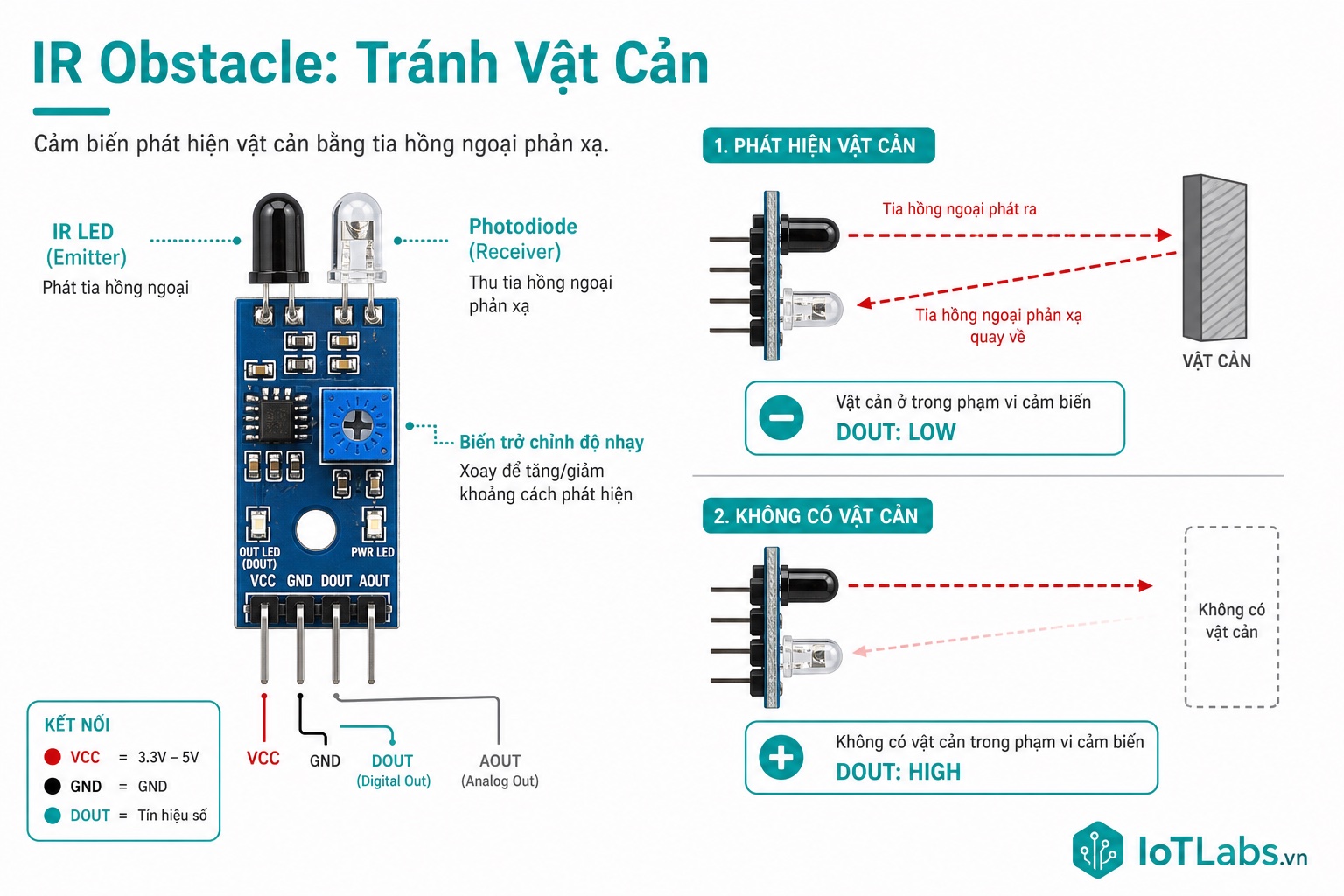
Series 37 Module Cảm Biến – Nguyên Lý Hoạt Động IR Obstacle Sensor: Phản Xạ Hồng Ngoại, LM393 & Tránh Vật Cản Robot
Phân tích IR Obstacle Sensor FC-51: LED IR 940nm phát-nhận phản xạ, LM393 comparator, điều chỉnh khoảng cách bằng triết áp. Nhiễu ánh sáng mặt trời, so sánh với Sharp GP2Y. Code robot tránh vật cản.
-
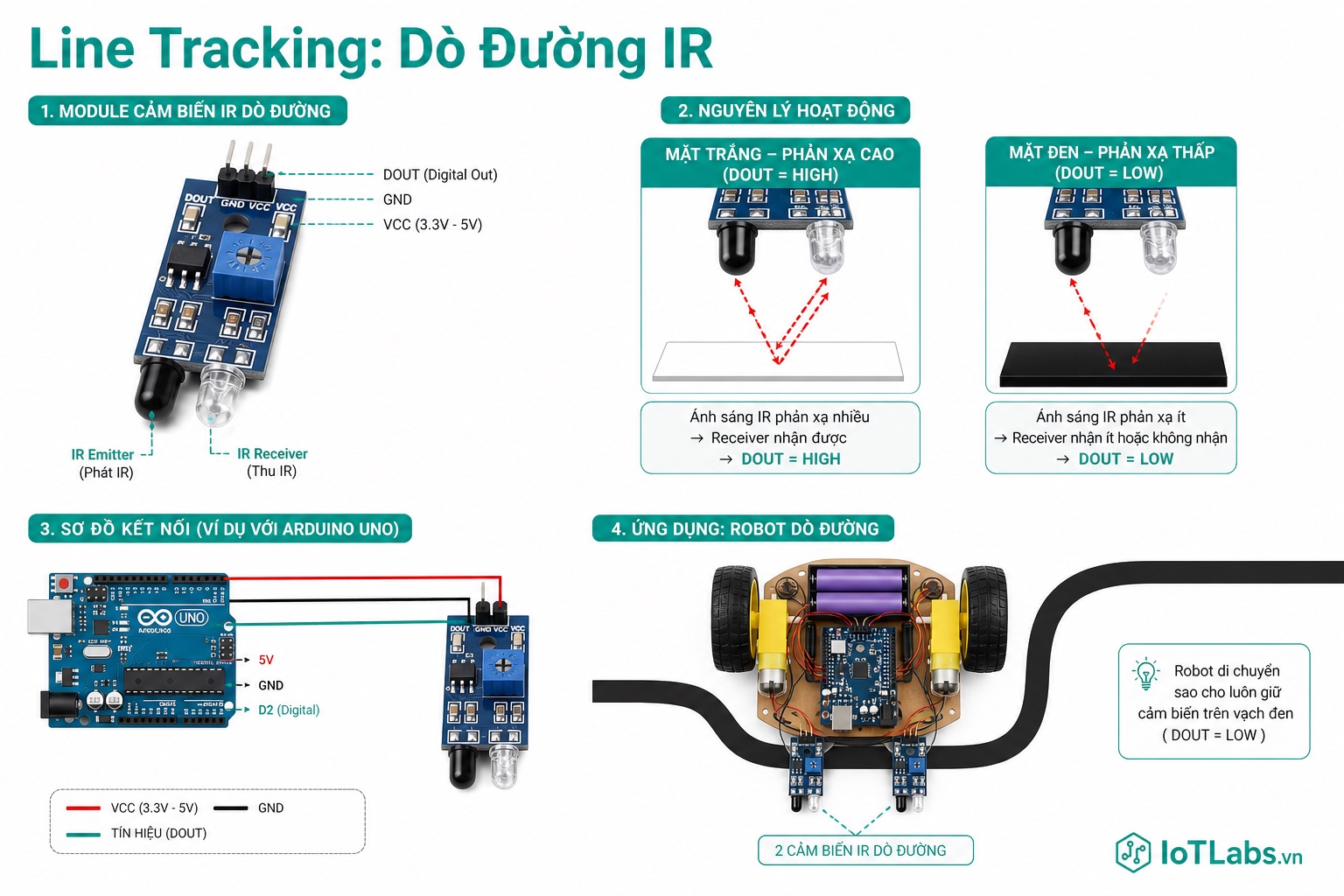
Series 37 Module Cảm Biến – Nguyên Lý Hoạt Động Line Tracking Sensor TCRT5000: Dò Đường IR, Khoảng Cách Tối Ưu & Robot Theo Vạch
Phân tích TCRT5000 line tracking: LED IR 890nm + phototransistor NPN, khoảng cách tối ưu 2.5mm, độ tương phản đen/trắng, module 3-sensor. So sánh với FC-51. Code robot theo vạch đơn giản và nâng cao.
-
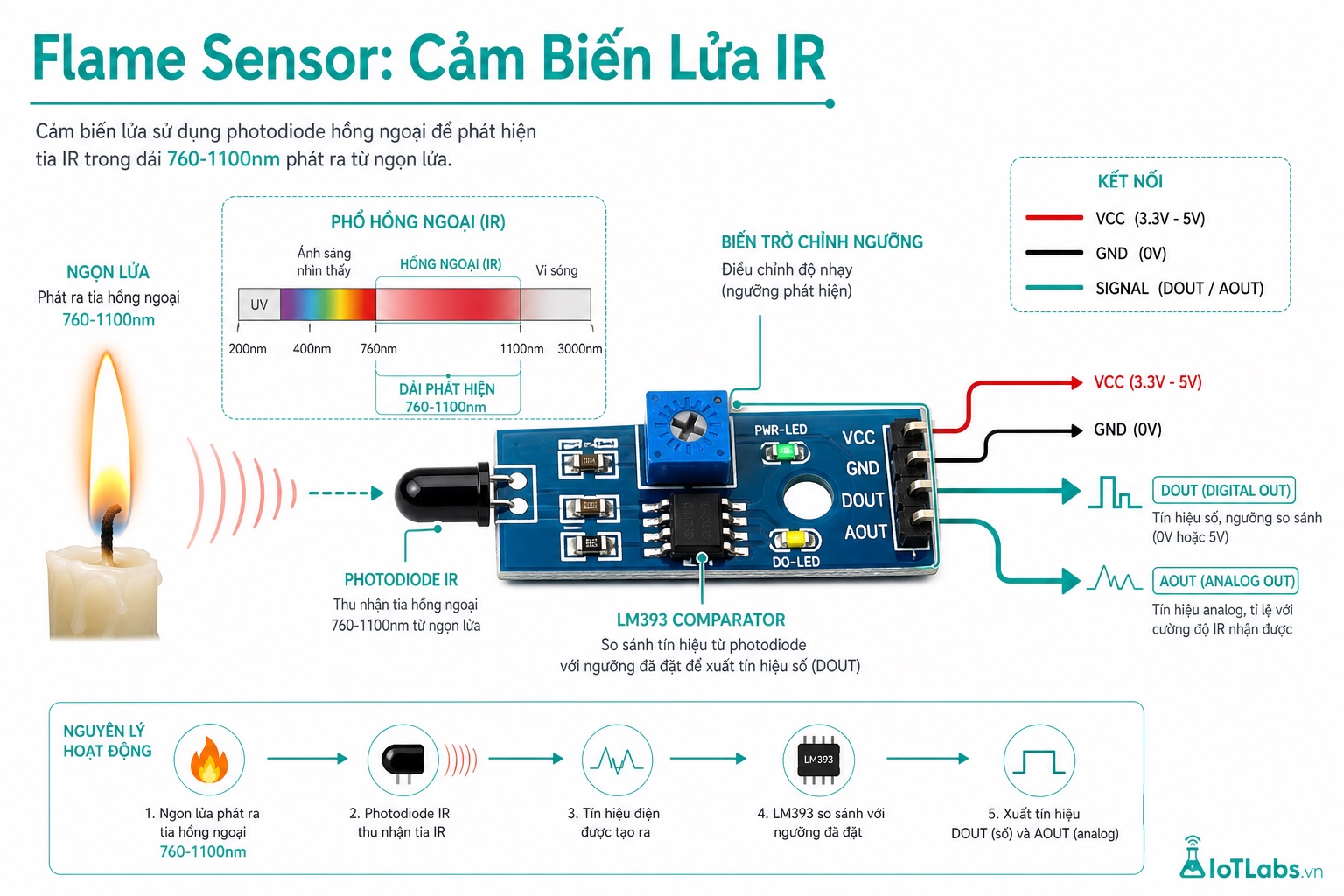
Series 37 Module Cảm Biến – Nguyên Lý Hoạt Động Flame Sensor: Phổ IR Lửa 760-1100nm, LM393 & Ứng Dụng Chữa Cháy
Phân tích Flame Sensor: photodiode nhạy phổ IR lửa 760-1100nm, tại sao lửa khác nguồn sáng thường, LM393 comparator, điều chỉnh ngưỡng 60° góc phát hiện. So sánh đơn-3-5 sensor. Code Arduino ESP32 robot chữa cháy.
-
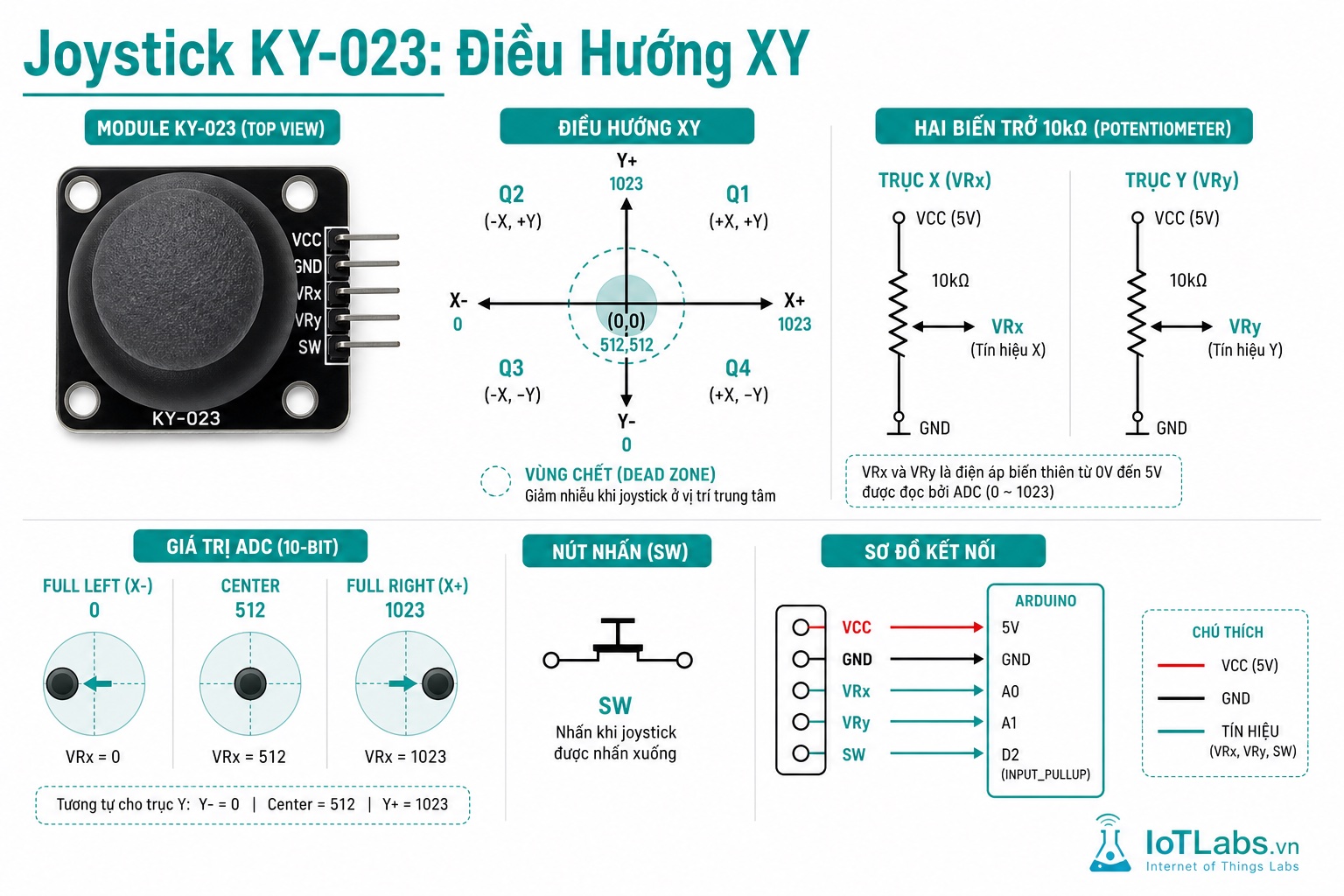
Series 37 Module Cảm Biến – Nguyên Lý Joystick KY-023: Biến Trở 2 Trục, Dead Zone & Điều Khiển Robot / Servo
Joystick KY-023: 2 biến trở 10kΩ cho trục X và Y, push button Z. Center position ~512 (Arduino) / ~2048 (ESP32). Dead zone xử lý drift cơ học. Code đọc tọa độ, normalize -1.0 đến +1.0, điều khiển servo, robot 2 bánh.
-
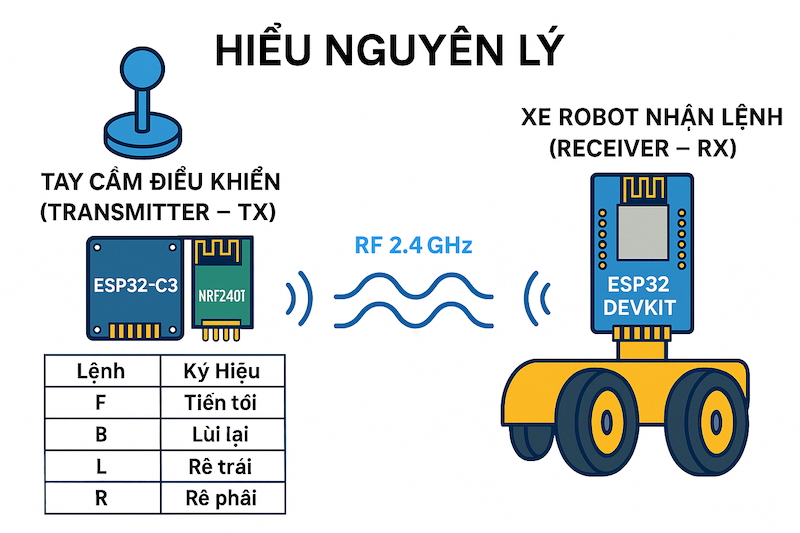
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 1): Hiểu nguyên lý
Bài học này giúp bạn hiểu nguyên lý điều khiển robot từ xa qua sóng RF 2.4GHz sử dụng module NRF24L01, chuẩn bị cho phần thiết kế phần cứng và lập trình thực tế.