Uncategorized
-
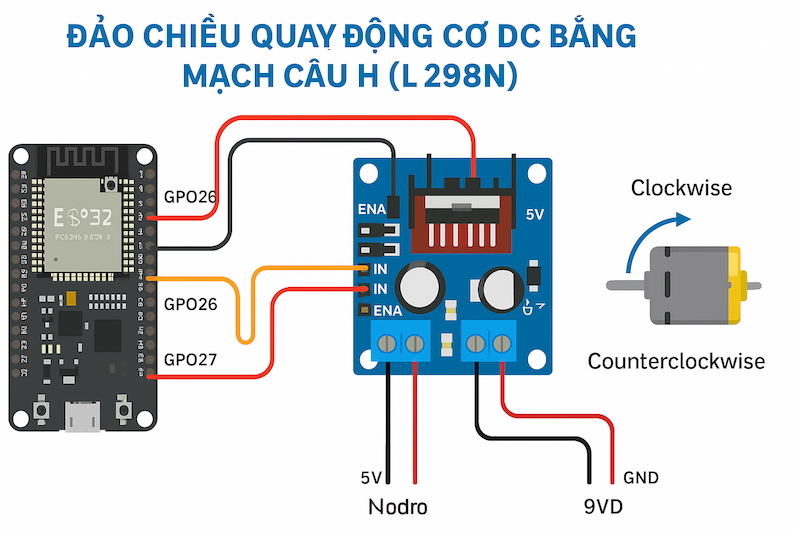
Lập trình & Điều khiển Động Cơ – Bài 3: Đảo chiều quay của động cơ DC bằng mạch cầu H (L298N)
Bài 3 hướng dẫn cách đảo chiều quay động cơ DC bằng mạch cầu H L298N trên ESP32, giúp robot có thể di chuyển linh hoạt với các hướng tiến, lùi, rẽ trái và rẽ phải.
-
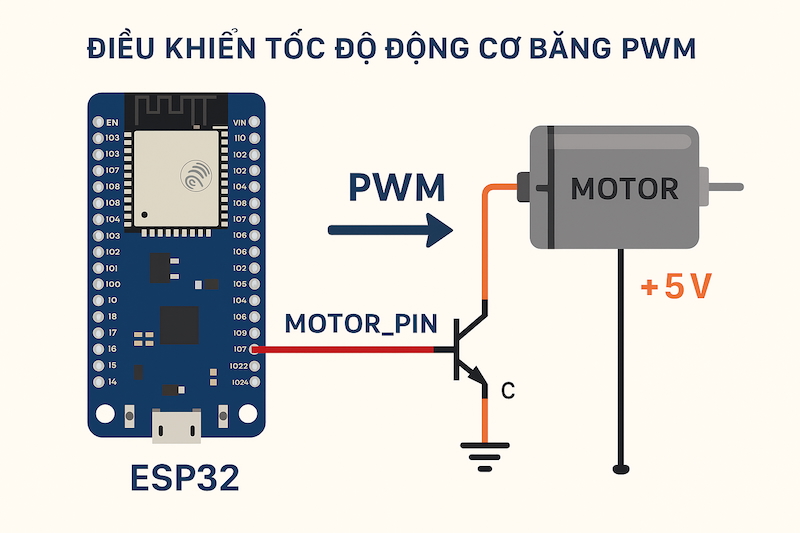
Lập trình & Điều khiển Động Cơ – Bài 2: Điều khiển tốc độ Động cơ DC bằng PWM
Bài 2 hướng dẫn cách điều khiển tốc độ động cơ DC bằng PWM trên ESP32, giúp bạn hiểu nguyên lý điều chế độ rộng xung và thực hành tạo chuyển động mượt mà cho robot.
-
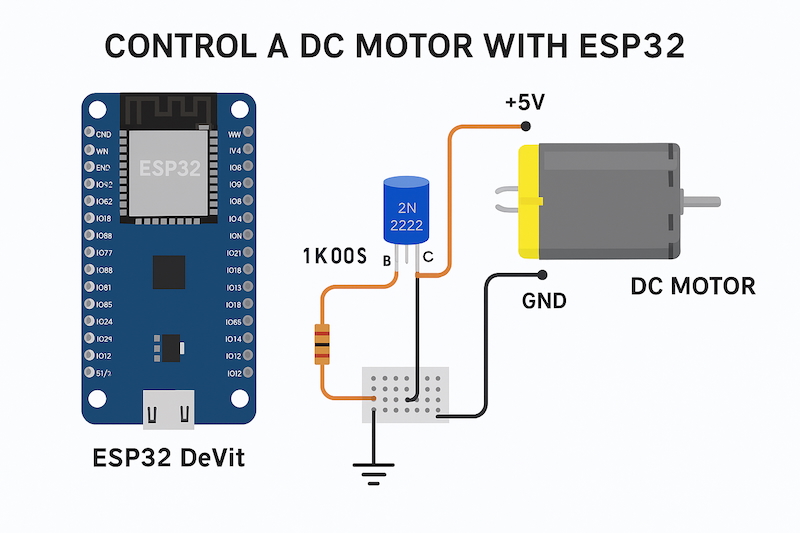
Lập trình & Điều khiển Động Cơ – Bài 1: Giới thiệu về Động cơ và Nguyên lý Hoạt động
Bài học đầu tiên trong khóa “Lập trình & Điều khiển Động Cơ” giúp bạn hiểu nguyên lý hoạt động của động cơ DC, phân biệt các loại động cơ và thực hành điều khiển động cơ bằng ESP32 DevKit 38 Pin.