
Uncategorized
-
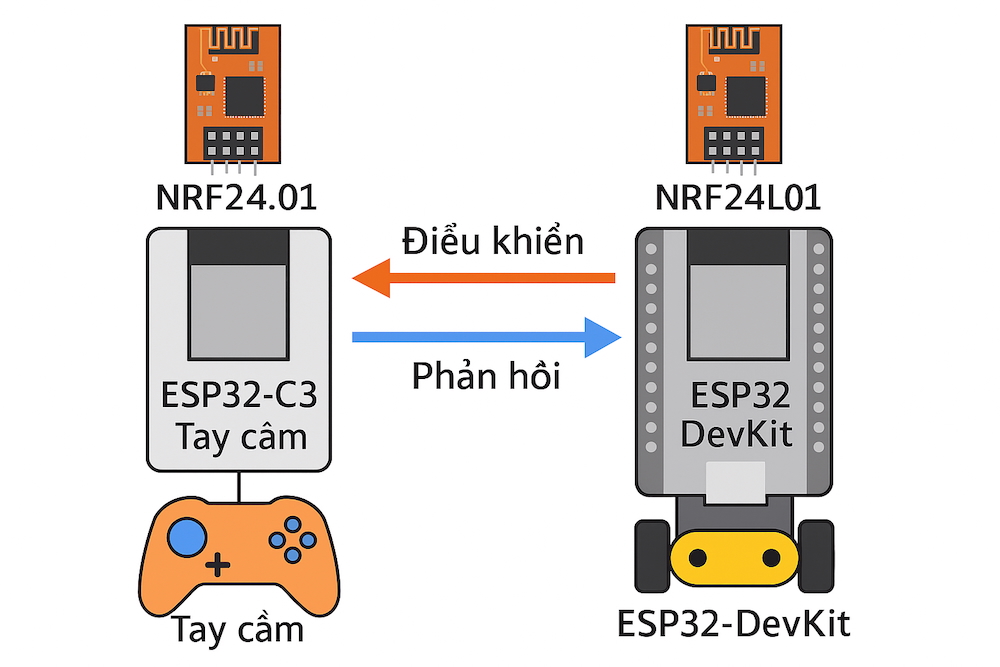
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 6): Truyền dữ liệu 2 chiều
Bài học hướng dẫn cách lập trình truyền dữ liệu hai chiều giữa tay cầm và robot dùng NRF24L01. Robot gửi dữ liệu cảm biến và pin về tay cầm giúp điều khiển thông minh hơn.
-
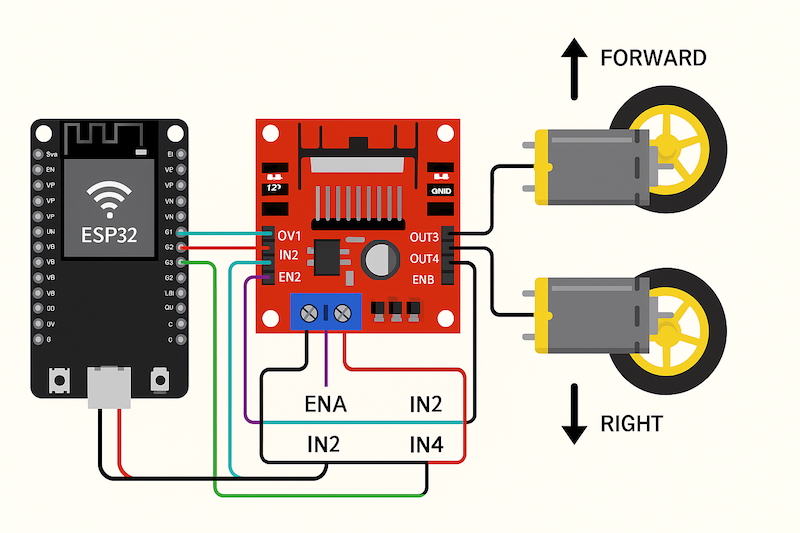
Lập trình & Điều khiển Động Cơ – Bài 4: Viết hàm điều khiển chuyển động cho xe robot
Bài 4 hướng dẫn viết hàm điều khiển chuyển động cho xe robot hai bánh bằng ESP32 và L298N, bao gồm các hướng tiến, lùi, rẽ trái, rẽ phải và dừng.
-
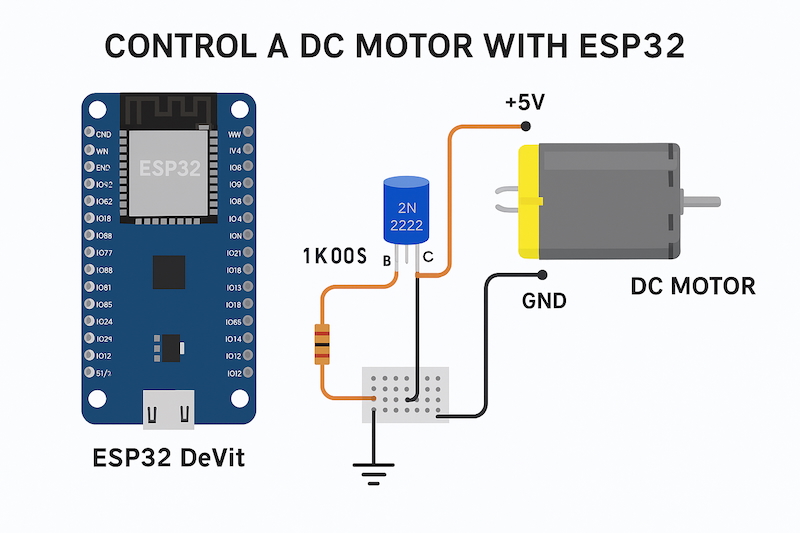
Lập trình & Điều khiển Động Cơ – Bài 1: Giới thiệu về Động cơ và Nguyên lý Hoạt động
Bài học đầu tiên trong khóa “Lập trình & Điều khiển Động Cơ” giúp bạn hiểu nguyên lý hoạt động của động cơ DC, phân biệt các loại động cơ và thực hành điều khiển động cơ bằng ESP32 DevKit 38 Pin.