
MPU-6050 là IMU (Inertial Measurement Unit) phổ biến nhất trong thế giới maker: 1 chip tích hợp 3 trục gia tốc kế + 3 trục con quay hồi chuyển, giao tiếp I2C. Bài này giải thích từng cảm biến hoạt động ra sao, tại sao không thể dùng riêng từng loại để đo góc, và complementary filter là giải pháp thực tế nhất.
Nguyên Lý Hoạt Động
1. MEMS Accelerometer — Đo Gia Tốc Tuyến Tính
MPU-6050 dùng MEMS (Micro-Electro-Mechanical System) capacitive accelerometer:
Nguyên lý MEMS accelerometer 1 trục (nhìn từ mặt cắt):
Substrate (cố định)
│
│ [Cấu trúc con lắc di động] ←── khối mass
│ │ │ │
│ ┃──┃ ┃──┃ ┃──┃
│ C1 C2 ← tụ điện (fingers)
│ ┃──┃ ┃──┃ ┃──┃
│
└────────── Substrate cố định
Khi không có gia tốc: C1 = C2 → output = 0
Khi gia tốc sang phải: khối mass lệch → C1 ≠ C2 → ΔC → điện ápTác dụng trọng lực: Khi nằm phẳng, trục Z đọc +1g (trọng lực kéo xuống = gia tốc đo ngược chiều).
- Phẳng trên bàn: ax=0g, ay=0g, az=+1g
- Nghiêng 90° sang phải: ax=+1g, ay=0g, az≈0g
2. MEMS Gyroscope — Đo Vận Tốc Góc
Gyroscope MEMS dùng hiệu ứng Coriolis:
Hiệu ứng Coriolis trong MEMS:
- Cấu trúc rung (vibrating mass) dao động theo trục X
- Khi quay quanh trục Z: lực Coriolis theo trục Y
- F_Coriolis = 2m(ω × v)
ω = vận tốc góc (rad/s) — cần đo
v = vận tốc dao động (biết)
- Đo lực Coriolis → suy ra ωOutput: Vận tốc góc (°/s). Tích phân theo thời gian → góc quay tuyệt đối. Nhưng tích phân sai số → drift tích lũy theo thời gian.
3. Vấn Đề Đo Góc — Tại Sao Cần Kết Hợp
| Accelerometer | Gyroscope | |
|---|---|---|
| Đo góc từ | Vector trọng lực (arctan) | Tích phân vận tốc góc |
| Chính xác lâu dài | Có (trọng lực không đổi) | Không (drift theo thời gian) |
| Nhiễu ngắn hạn | Nhiều (rung, va chạm) | Ít (ổn định) |
| Khi di chuyển nhanh | Sai (gia tốc tuyến tính + trọng lực) | Đúng |
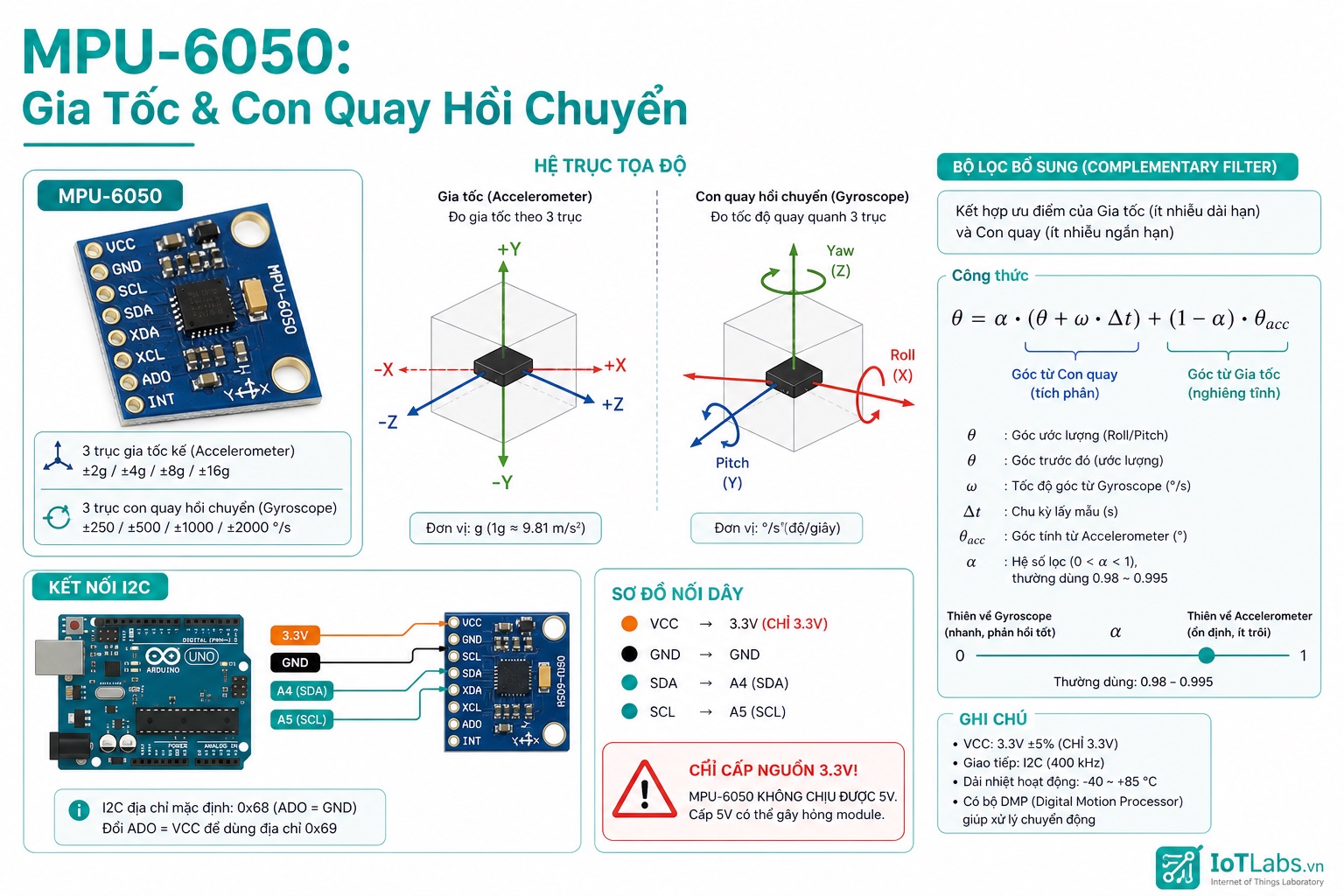
Giải pháp — Complementary Filter:
angle = α × (angle + gyro_rate × dt) + (1-α) × accel_angle
α = 0.98 (98% tin vào gyro ngắn hạn)
(1-α) = 0.02 (2% hiệu chỉnh drift từ accelerometer)
dt = thời gian giữa 2 lần đọc (giây)4. I2C Address và DMP
Địa chỉ I2C:
- AD0 = LOW (nối GND): 0x68
- AD0 = HIGH (nối VCC): 0x69
- Có thể dùng 2 MPU-6050 trên cùng bus với 2 địa chỉ khác nhau
DMP (Digital Motion Processor):
- IC bên trong MPU-6050 có processor nhỏ
- Tính toán quaternion/góc trực tiếp trên chip
- Giảm tải MCU, nhưng cần firmware phức tạp (thư viện jeff-rowberg/i2cdevlib)
Thông Số Kỹ Thuật
| Thông số | Giá trị |
|---|---|
| Điện áp hoạt động | 3.3V (tối đa 3.6V — KHÔNG 5V!) |
| Dòng tiêu thụ | 3.9mA (active) |
| Giao tiếp | I2C (400kHz max) |
| ADC | 16-bit per channel |
| Gyro range | ±250 / ±500 / ±1000 / ±2000 °/s |
| Accel range | ±2g / ±4g / ±8g / ±16g |
| Gyro sensitivity | 131 LSB/(°/s) tại ±250 |
| Accel sensitivity | 16384 LSB/g tại ±2g |
| Nhiệt độ cảm biến | -40°C đến 85°C |
Sơ Đồ Chân (Pinout)
MPU-6050 Module:
┌──────────────────────────────────────┐
│ [MPU-6050 IC] │
└──────────────────────────────────────┘
VCC GND SCL SDA XDA XCL AD0 INT| Chân | Mô tả |
|---|---|
| VCC | 3.3V — KHÔNG cấp 5V! |
| GND | Mass |
| SCL | I2C Clock |
| SDA | I2C Data |
| AD0 | Địa chỉ: GND=0x68, VCC=0x69 |
| INT | Interrupt output (tùy chọn) |
| XDA, XCL | I2C phụ cho external sensor (ít dùng) |
Kết Nối Phần Cứng
MPU-6050 với ESP32 DevKit V1
ESP32 DevKit V1 MPU-6050 Module
───────────────────── ─────────────────
3V3 ─────────────────→ VCC ← 3.3V — bắt buộc!
GND ─────────────────→ GND
GPIO21 (SDA) ──────────→ SDA
GPIO22 (SCL) ──────────→ SCL
GND ─────────────────→ AD0 ← Địa chỉ 0x68I2C mặc định của ESP32: SDA=GPIO21, SCL=GPIO22.
MPU-6050 với Arduino Uno
Arduino Uno MPU-6050 Module
───────────────────── ─────────────────
3.3V ─────────────────→ VCC ← 3.3V pin trên Uno (max 50mA — đủ)
GND ─────────────────→ GND
A4 (SDA) ──────────────→ SDA
A5 (SCL) ──────────────→ SCL
GND ─────────────────→ AD0⚠️ Quan trọng: Chỉ nối VCC vào 3.3V pin. Arduino Uno có 3.3V regulator nhỏ nhưng đủ cấp cho MPU-6050 (3.9mA). Không nối 5V — sẽ hỏng chip.
I2C level: Arduino Uno chạy I2C ở 5V, MPU-6050 SDA/SCL tolerance đến 5V → an toàn trong trường hợp này.
Cài Đặt Thư Viện
Arduino IDE → Library Manager:
- Tìm “MPU6050” by Electronic Cats → Install
- Hoặc “MPU6050_tockn” (đơn giản hơn)
- Cài thêm “Wire” (thường đã có)
Code Arduino IDE
Code Đọc Raw Data Cơ Bản — Arduino Uno
/*
* MPU-6050 — Đọc raw accelerometer và gyroscope
* Board: Arduino Uno
* Kết nối: VCC→3.3V, GND→GND, SDA→A4, SCL→A5, AD0→GND
*
* Library: MPU6050 by Electronic Cats (Library Manager)
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup() {
Serial.begin(9600);
Wire.begin(); // Khởi động I2C
mpu.initialize(); // Khởi động MPU-6050
// Kiểm tra kết nối
if (mpu.testConnection()) {
Serial.println("MPU-6050 kết nối OK (0x68)");
} else {
Serial.println("MPU-6050 KHÔNG kết nối được!");
while (true); // Dừng nếu lỗi
}
// Cấu hình range
mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2); // ±2g
mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250); // ±250°/s
Serial.println("ax(g)\tay(g)\taz(g)\tgx(°/s)\tgy(°/s)\tgz(°/s)");
}
void loop() {
int16_t ax_raw, ay_raw, az_raw;
int16_t gx_raw, gy_raw, gz_raw;
// Đọc raw data (16-bit signed integer)
mpu.getMotion6(&ax_raw, &ay_raw, &az_raw, &gx_raw, &gy_raw, &gz_raw);
// Chuyển đổi về đơn vị thực tế
// Accel: 16384 LSB/g (ở ±2g range)
float ax = ax_raw / 16384.0;
float ay = ay_raw / 16384.0;
float az = az_raw / 16384.0;
// Gyro: 131 LSB/(°/s) (ở ±250°/s range)
float gx = gx_raw / 131.0;
float gy = gy_raw / 131.0;
float gz = gz_raw / 131.0;
Serial.print(ax, 3); Serial.print("\t");
Serial.print(ay, 3); Serial.print("\t");
Serial.print(az, 3); Serial.print("\t");
Serial.print(gx, 2); Serial.print("\t");
Serial.print(gy, 2); Serial.print("\t");
Serial.println(gz, 2);
delay(200);
}Code Tính Góc Nghiêng Từ Accelerometer — Arduino Uno
/*
* MPU-6050 — Tính pitch và roll từ accelerometer
* Pitch (xoay quanh trục Y), Roll (xoay quanh trục X)
* Board: Arduino Uno
* Kết nối: VCC→3.3V, GND→GND, SDA→A4, SCL→A5
*
* Giới hạn: chỉ chính xác khi gần tĩnh (không rung, không chuyển động)
*/
#include <Wire.h>
#include <MPU6050.h>
#include <math.h> // Cho atan2() và sqrt()
MPU6050 mpu;
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.initialize();
mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2);
Serial.println("Pitch (°)\tRoll (°)");
}
void loop() {
int16_t ax_raw, ay_raw, az_raw;
int16_t gx_dummy, gy_dummy, gz_dummy;
mpu.getMotion6(&ax_raw, &ay_raw, &az_raw, &gx_dummy, &gy_dummy, &gz_dummy);
float ax = ax_raw / 16384.0; // g
float ay = ay_raw / 16384.0;
float az = az_raw / 16384.0;
// Tính góc nghiêng từ vector trọng lực:
// Pitch: quay quanh trục Y (nghiêng trước/sau)
// Roll: quay quanh trục X (nghiêng trái/phải)
float pitch = atan2(-ax, sqrt(ay * ay + az * az)) * 180.0 / PI;
float roll = atan2(ay, az) * 180.0 / PI;
Serial.print(pitch, 2); Serial.print("°\t\t");
Serial.print(roll, 2); Serial.println("°");
delay(100);
}Code Complementary Filter — Ổn Định Góc (Arduino Uno)
/*
* MPU-6050 — Complementary Filter: kết hợp accel + gyro
* Kết quả: góc ổn định, không bị rung (như accel) và không bị drift (như gyro)
* Board: Arduino Uno
* Kết nối: VCC→3.3V, GND→GND, SDA→A4, SCL→A5
*/
#include <Wire.h>
#include <MPU6050.h>
#include <math.h>
MPU6050 mpu;
const float ALPHA = 0.98; // 98% gyro, 2% accel
float pitch = 0.0; // Góc pitch tổng hợp (°)
float roll = 0.0; // Góc roll tổng hợp (°)
unsigned long lastTime = 0;
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.initialize();
mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2);
mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250);
// Calibrate bằng cách đọc vài giây tĩnh
// (Bỏ qua trong ví dụ này — gyro offset cần ~50 mẫu trung bình)
lastTime = millis();
Serial.println("Pitch(°)\tRoll(°)");
}
void loop() {
unsigned long now = millis();
float dt = (now - lastTime) / 1000.0; // Thời gian giữa 2 lần (giây)
lastTime = now;
int16_t ax_r, ay_r, az_r, gx_r, gy_r, gz_r;
mpu.getMotion6(&ax_r, &ay_r, &az_r, &gx_r, &gy_r, &gz_r);
// Chuyển đổi
float ax = ax_r / 16384.0;
float ay = ay_r / 16384.0;
float az = az_r / 16384.0;
float gx = gx_r / 131.0; // °/s (vận tốc góc trục X)
float gy = gy_r / 131.0; // °/s (vận tốc góc trục Y)
// Góc từ accelerometer (chính xác dài hạn, nhiễu ngắn hạn)
float accel_pitch = atan2(-ax, sqrt(ay * ay + az * az)) * 180.0 / PI;
float accel_roll = atan2(ay, az) * 180.0 / PI;
// Complementary Filter:
// pitch += gy * dt ← gyro cập nhật (chính xác ngắn hạn)
// Kết hợp với accel_pitch (hiệu chỉnh drift dài hạn)
pitch = ALPHA * (pitch + gy * dt) + (1.0 - ALPHA) * accel_pitch;
roll = ALPHA * (roll + gx * dt) + (1.0 - ALPHA) * accel_roll;
Serial.print(pitch, 2); Serial.print("°\t\t");
Serial.print(roll, 2); Serial.println("°");
delay(10); // 100Hz sampling
}Code ESP32 — MPU-6050 với Wire.h
/*
* MPU-6050 — ESP32, đọc gyro + accel + nhiệt độ
* Board: ESP32 DevKit V1
* Kết nối: VCC→3V3, GND→GND, SDA→GPIO21, SCL→GPIO22
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup() {
Serial.begin(115200);
Wire.begin(21, 22); // SDA=GPIO21, SCL=GPIO22 (ESP32 default)
mpu.initialize();
if (mpu.testConnection()) {
Serial.println("MPU-6050 OK");
} else {
Serial.println("MPU-6050 KHÔNG TÌM THẤY!");
while (true);
}
mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2);
mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250);
Serial.println("Đọc IMU 6 trục...");
}
void loop() {
int16_t ax, ay, az, gx, gy, gz;
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
int16_t tempRaw = mpu.getTemperature();
// Chuyển đổi
float accelX = ax / 16384.0; float accelY = ay / 16384.0; float accelZ = az / 16384.0;
float gyroX = gx / 131.0; float gyroY = gy / 131.0; float gyroZ = gz / 131.0;
float tempC = tempRaw / 340.0 + 36.53; // Theo datasheet MPU-6050
Serial.printf("Accel: X=%.2fg Y=%.2fg Z=%.2fg\n", accelX, accelY, accelZ);
Serial.printf("Gyro: X=%.1f°/s Y=%.1f°/s Z=%.1f°/s\n", gyroX, gyroY, gyroZ);
Serial.printf("Temp: %.1f°C\n\n", tempC);
delay(500);
}Kết Quả Mong Đợi
MPU-6050 kết nối OK (0x68)
ax(g) ay(g) az(g) gx(°/s) gy(°/s) gz(°/s)
0.003 -0.012 1.001 0.31 -0.15 0.08
0.002 -0.011 0.999 0.29 -0.12 0.10Ứng Dụng Thực Tế
| Ứng dụng | Chi tiết |
|---|---|
| Robot tự cân bằng | PID điều khiển motor dựa trên pitch angle |
| Gimbal camera | Bù rung bằng cách phản chiều góc đo |
| Phát hiện ngã | Tích phân gia tốc lớn đột ngột → alert |
| Điều khiển cử chỉ | Nghiêng tay phải → rẽ phải |
| Drone flight controller | 6-DOF cho attitude estimation |
Lưu Ý Khi Sử Dụng
1. VCC phải là 3.3V — không có ngoại lệ
MPU-6050 VCC max là 3.6V. 5V sẽ phá hủy chip ngay lập tức và vĩnh viễn.
2. Gyro drift — calibrate offset
Khi đặt yên, gyro không đọc 0 mà có offset nhỏ (~0.1-0.5°/s). Tích phân offset này → drift góc theo thời gian. Calibrate: đọc 100-500 mẫu khi yên → lấy trung bình → đó là offset → trừ ra khi đọc.
// Calibrate gyro offset (giữ module yên trong 2-3 giây)
float gx_offset = 0, gy_offset = 0, gz_offset = 0;
for (int i = 0; i < 200; i++) {
int16_t ax, ay, az, gx, gy, gz;
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
gx_offset += gx / 131.0;
gy_offset += gy / 131.0;
gz_offset += gz / 131.0;
delay(10);
}
gx_offset /= 200; gy_offset /= 200; gz_offset /= 200;3. Complementary filter vs Kalman filter
Complementary filter: đơn giản, phù hợp hobby. Kalman filter: tối ưu toán học, phức tạp hơn, dùng trong nghiên cứu. Cho hầu hết ứng dụng maker: complementary filter đủ.
4. dt (delta time) phải chính xác
Gyro tích phân cần dt chính xác. Dùng millis() không đủ tốt vì resolution 1ms. micros() tốt hơn cho sampling > 100Hz.