
Servo Motor Là Gì?
Servo motor là động cơ điều khiển vị trí góc — khác với DC motor chỉ quay tròn, servo giữ ở một góc cụ thể với độ chính xác cao.
Cấu tạo:
- Động cơ DC nhỏ
- Hộp số giảm tốc (gear box)
- Mạch phản hồi vị trí (encoder/potentiometer)
- Bộ điều khiển PID tích hợp
Thông số servo SG90 (phổ biến nhất, giá ~20.000 VNĐ):
| Thông số | Giá trị |
|---|---|
| Góc quay | 0° – 180° |
| Điện áp | 4.8V – 6V |
| Mô-men | 1.8 kg·cm (4.8V) |
| Tốc độ | 0.1s/60° |
| Màu dây | Vàng=Signal, Đỏ=VCC, Nâu=GND |
Nguyên Lý Điều Khiển — Tín Hiệu PWM
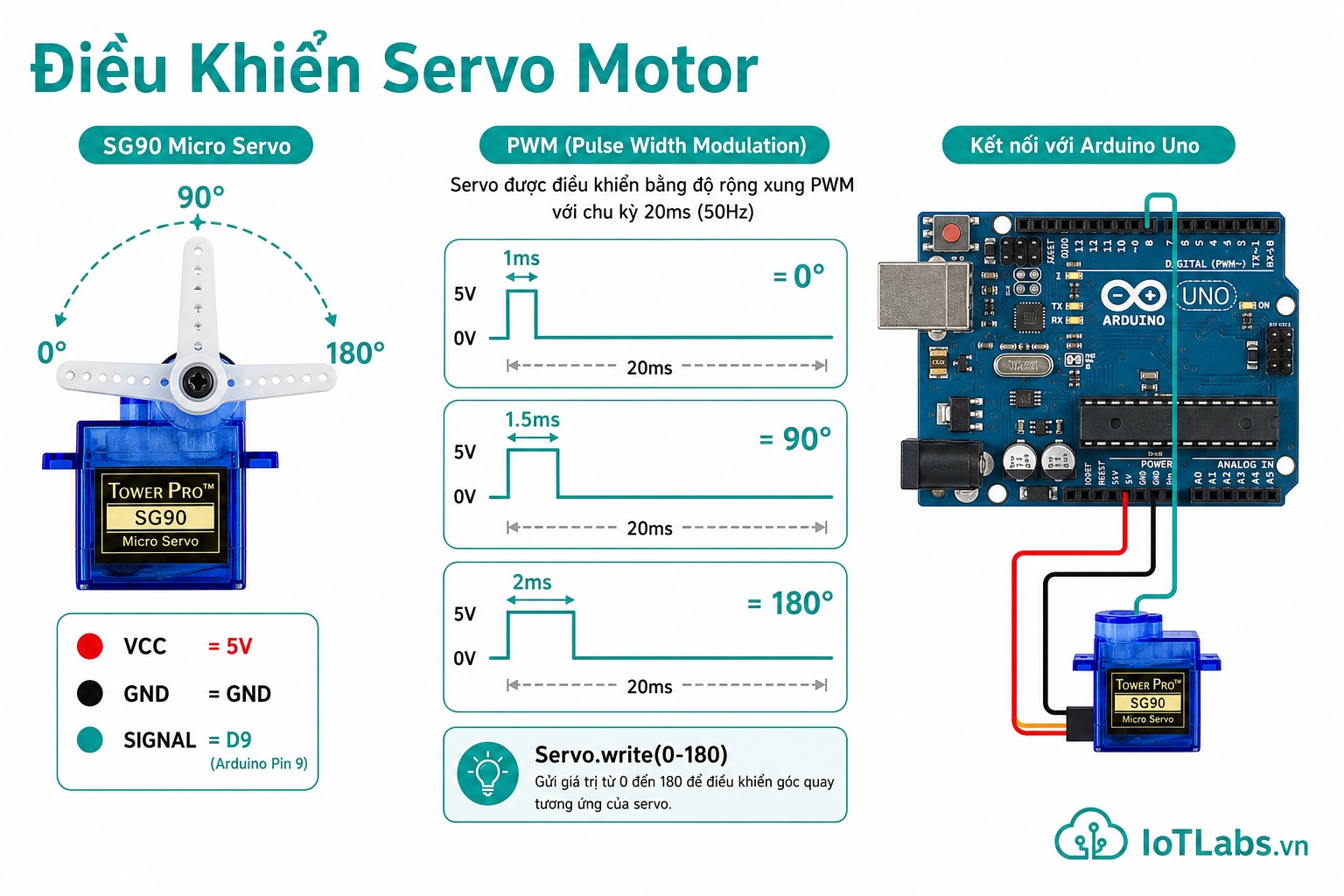
Servo nhận tín hiệu PWM 50Hz (chu kỳ 20ms), độ rộng xung xác định góc:
Góc 0°: xung 1.0ms trong 20ms → 5% duty cycle
Góc 90°: xung 1.5ms trong 20ms → 7.5% duty cycle
Góc 180°: xung 2.0ms trong 20ms → 10% duty cycleArduino dùng Timer1 (pin D9, D10) để tạo tín hiệu này — thư viện Servo.h lo hết phần này.
📷 [Hình minh hoạ: Sơ đồ Arduino Uno kết nối servo SG90 — PWM signal pin 9, VCC đỏ, GND đen, tín hiệu PWM pulse diagram 1ms–2ms, nền trắng]
Kết Nối Phần Cứng
Servo Vàng (Signal) ── D9 Arduino
Servo Đỏ (VCC) ── 5V Arduino
Servo Nâu (GND) ── GND ArduinoLưu ý: SG90 kéo ~200–250 mA khi chạy. Nếu dùng nhiều servo (2+) cần nguồn ngoài 5V — không lấy hết từ USB vì Arduino chỉ cung cấp tối đa 500 mA.
Thư Viện Servo.h
Servo.h là thư viện tích hợp sẵn trong Arduino IDE — không cần cài thêm.
#include <Servo.h>Hàm chính:
| Hàm | Chức năng |
|---|---|
myServo.attach(pin) | Kết nối servo với chân PWM |
myServo.write(angle) | Quay đến góc (0–180) |
myServo.writeMicroseconds(us) | Điều khiển trực tiếp bằng microsecond |
myServo.read() | Đọc góc hiện tại |
myServo.detach() | Ngắt tín hiệu (servo tự do) |
Code Cơ Bản
Quét Góc 0° → 180° → 0°
#include <Servo.h>
Servo myServo;
const int SERVO_PIN = 9;
void setup() {
myServo.attach(SERVO_PIN);
Serial.begin(9600);
}
void loop() {
// Quét từ 0° đến 180°
for (int angle = 0; angle <= 180; angle += 1) {
myServo.write(angle);
delay(15); // ~15ms để servo đến vị trí
Serial.println(angle);
}
// Quét ngược từ 180° về 0°
for (int angle = 180; angle >= 0; angle -= 1) {
myServo.write(angle);
delay(15);
}
}Điều Khiển Bằng Biến Trở
#include <Servo.h>
Servo myServo;
const int SERVO_PIN = 9;
const int POT_PIN = A0;
void setup() {
myServo.attach(SERVO_PIN);
Serial.begin(9600);
}
void loop() {
int rawPot = analogRead(POT_PIN); // 0–1023
int angle = map(rawPot, 0, 1023, 0, 180); // Chuyển sang 0–180°
myServo.write(angle);
Serial.print("Pot: "); Serial.print(rawPot);
Serial.print(" → Angle: "); Serial.print(angle);
Serial.println("°");
delay(15);
}Xoay biến trở — servo quay theo thời gian thực!
Điều Khiển Qua Serial
#include <Servo.h>
Servo myServo;
void setup() {
myServo.attach(9);
Serial.begin(9600);
Serial.println("Nhập góc (0-180) và Enter:");
}
void loop() {
if (Serial.available() > 0) {
int angle = Serial.parseInt(); // Đọc số nguyên từ Serial
if (angle >= 0 && angle <= 180) {
myServo.write(angle);
Serial.print("Đã quay đến: ");
Serial.print(angle);
Serial.println("°");
} else {
Serial.println("Góc hợp lệ: 0–180");
}
}
}Gõ số trong Serial Monitor → servo quay đến góc đó.
Nhiều Servo
Một Arduino Uno có thể điều khiển đến 12 servo (thư viện Servo.h chiếm dụng Timer1, ảnh hưởng PWM trên D9, D10):
#include <Servo.h>
Servo servo1, servo2, servo3;
void setup() {
servo1.attach(9);
servo2.attach(10);
servo3.attach(11);
}
void loop() {
// Tất cả về 0°
servo1.write(0); servo2.write(0); servo3.write(0);
delay(1000);
// Tất cả về 90°
servo1.write(90); servo2.write(90); servo3.write(90);
delay(1000);
// Tất cả về 180°
servo1.write(180); servo2.write(180); servo3.write(180);
delay(1000);
}Ứng Dụng Thực Tế
| Dự án | Servo dùng |
|---|---|
| Cánh tay robot | 3–6 servo ở các khớp |
| Pan-tilt camera | 2 servo (ngang + dọc) |
| Khóa cửa | 1 servo xoay chốt |
| Cánh máy bay RC | 4+ servo điều khiển aileron, elevator, rudder |
| Búp bê robot | Servo điều khiển miệng, mắt |
Tổng Kết
#include <Servo.h>
Servo myServo;
myServo.attach(9); // Gắn vào chân 9
myServo.write(90); // Quay đến 90°
myServo.read(); // Đọc góc hiện tại
myServo.detach(); // Ngắt tín hiệuBài tiếp theo: LCD 16×2 với I2C — hiển thị text, số và ký tự custom trên màn hình 2 dòng × 16 ký tự. Chuẩn bị module LCD và board I2C adapter.