
servo
-
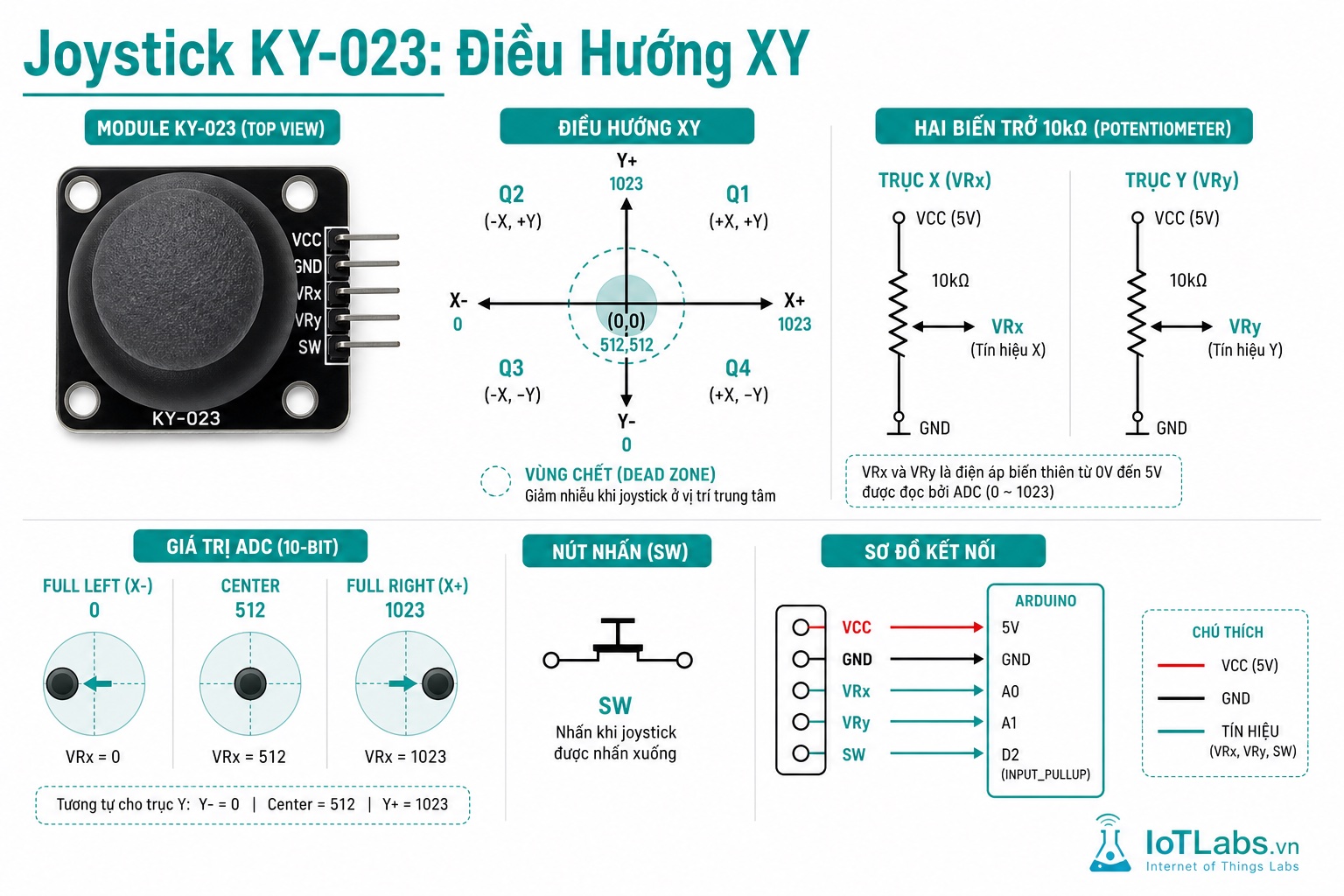
Series 37 Module Cảm Biến – Nguyên Lý Joystick KY-023: Biến Trở 2 Trục, Dead Zone & Điều Khiển Robot / Servo
Joystick KY-023: 2 biến trở 10kΩ cho trục X và Y, push button Z. Center position ~512 (Arduino) / ~2048 (ESP32). Dead zone xử lý drift cơ học. Code đọc tọa độ, normalize -1.0 đến +1.0, điều khiển servo, robot 2 bánh.
-
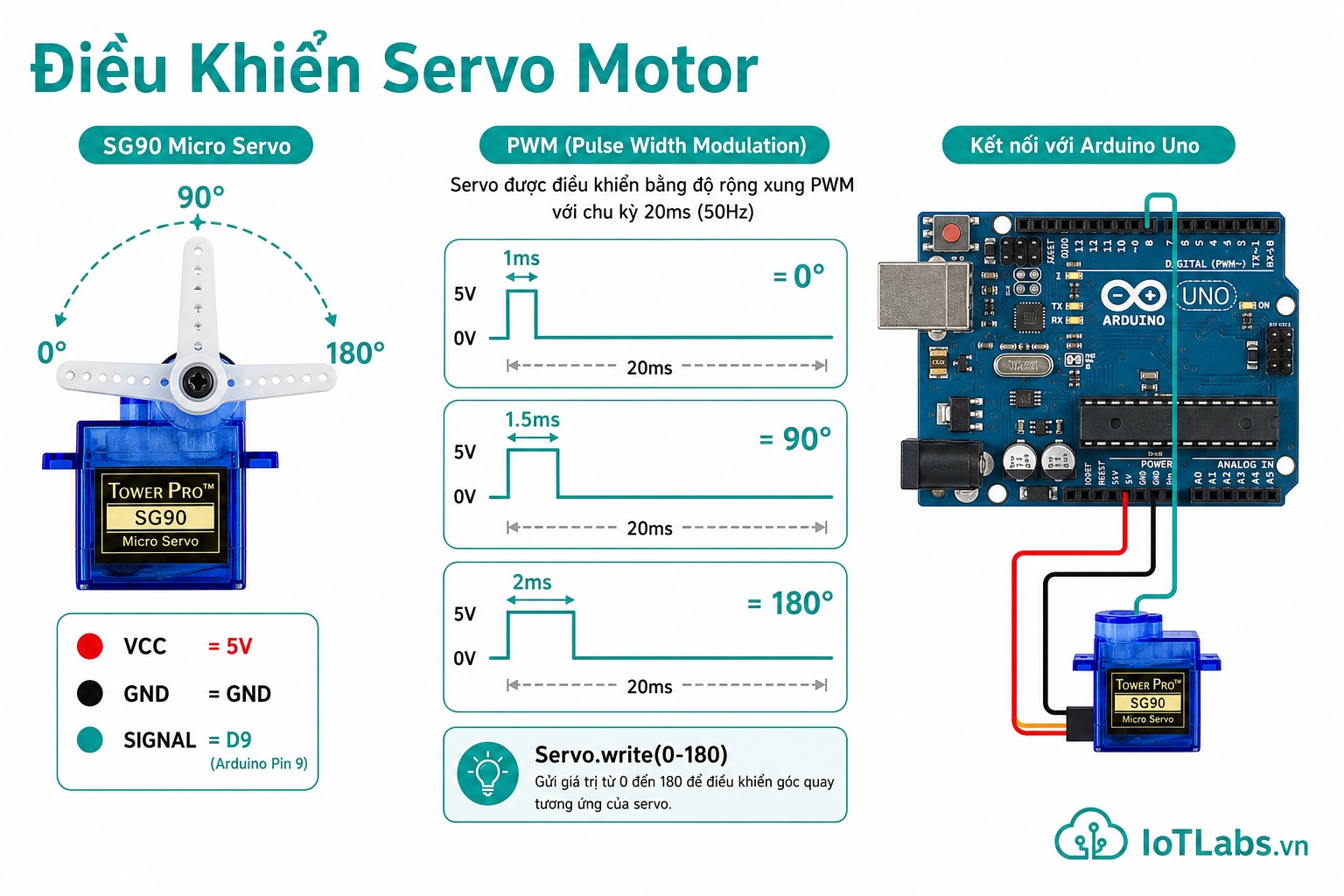
Điều Khiển Servo Motor với Arduino — Góc Quay Chính Xác từ 0° đến 180°
Học cách điều khiển servo motor SG90/MG996R với thư viện Servo.h của Arduino. Hiểu tín hiệu PWM điều khiển góc, kết hợp với biến trở và Serial để tạo hệ thống điều khiển góc.
-
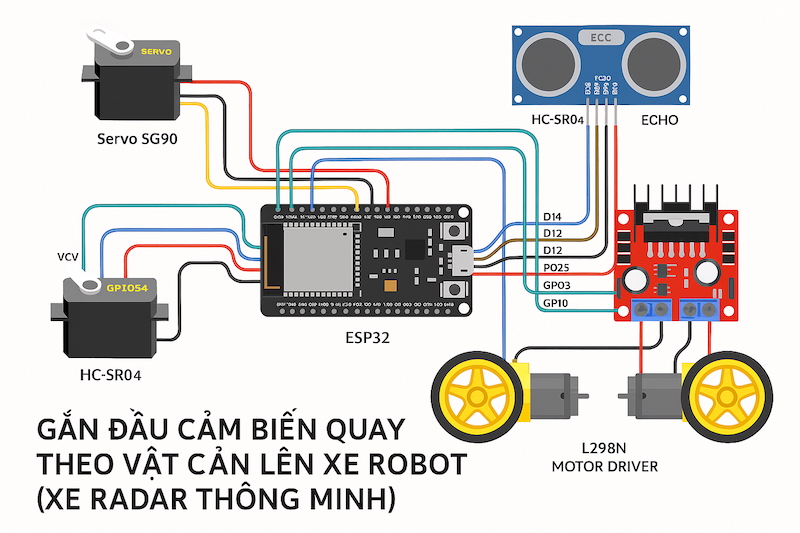
Lập trình & Điều khiển Động Cơ – Bài 14: Lăp ráp đầu cảm biến quay theo vật cản lên xe robot (Xe radar thông minh)
Bài 14 hướng dẫn gắn hệ thống radar servo + HC-SR04 lên xe robot để xe tự quét vật cản và chọn hướng đi an toàn bằng ESP32.
-
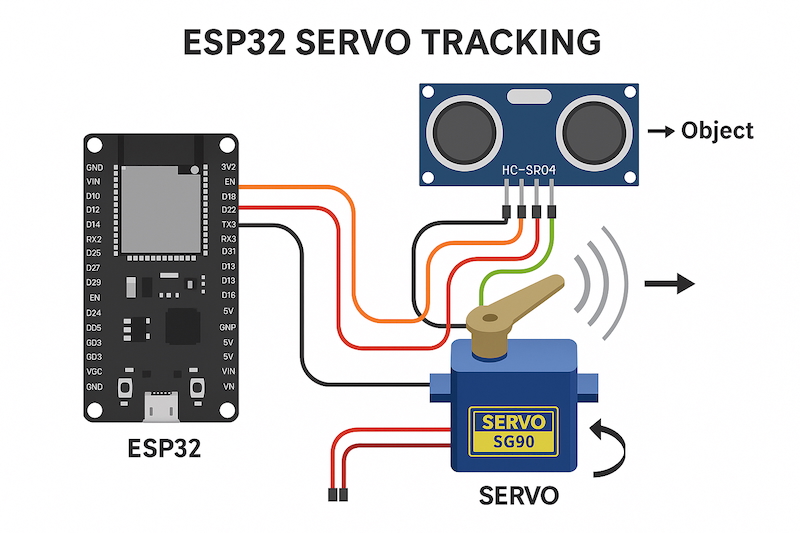
Lập trình & Điều khiển Động Cơ – Bài 13: Servo Tracking, tạo hệ thống đầu quay cảm biến tự động theo vật cản
Bài 13 hướng dẫn tạo hệ thống servo tracking, giúp cảm biến HC-SR04 tự động quay theo vật cản gần nhất bằng ESP32, mô phỏng đầu robot biết “nhìn theo” mục tiêu.
-
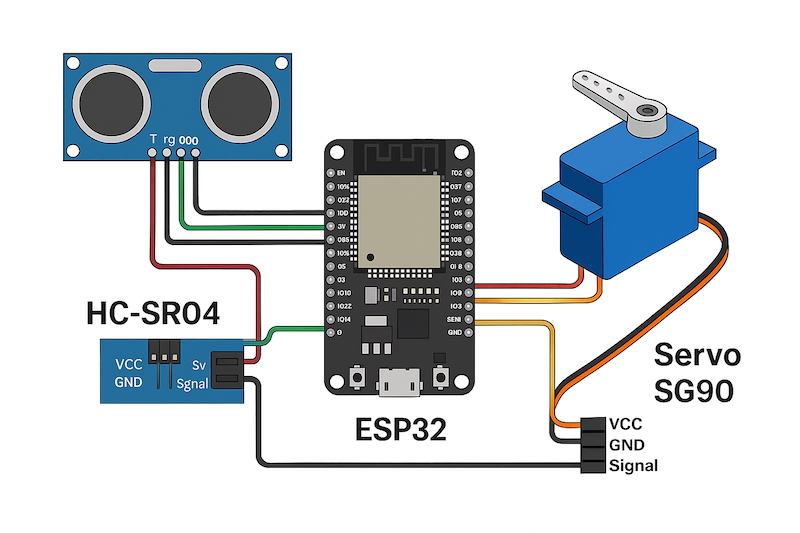
Lập trình & Điều khiển Động Cơ – Bài 12: Kết hợp Servo và Cảm biến siêu âm HC-SR04 – Quay theo vật cản (Radar mini)
Bài 12 hướng dẫn kết hợp Servo SG90 và cảm biến siêu âm HC-SR04 để tạo radar mini, giúp robot quét góc 180° và đo khoảng cách theo từng hướng.
-
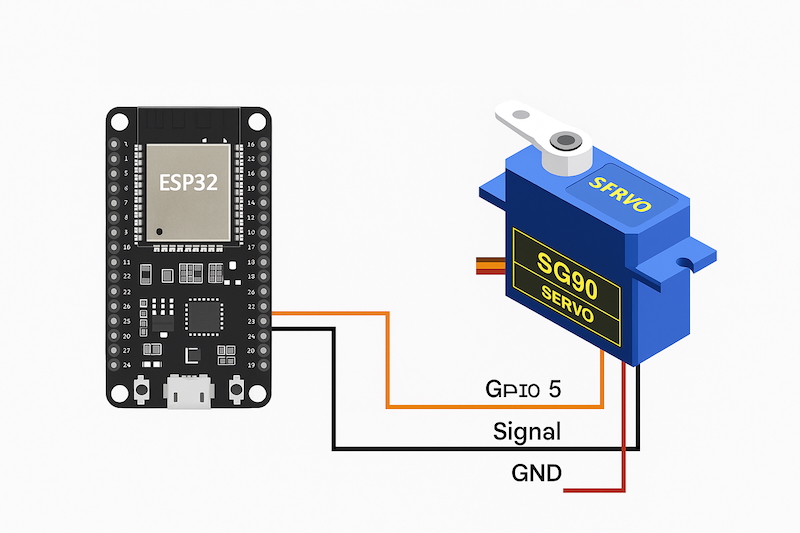
Lập trình & Điều khiển Động Cơ – Bài 11: Điều khiển Servo bằng ESP32 (Cơ bản và Ứng dụng trong robot)
Bài 11 hướng dẫn điều khiển Servo SG90 bằng ESP32, từ nguyên lý PWM đến ứng dụng điều khiển góc quay 0°–180° trong các dự án robot thực tế.
-

Lập trình ESP32 – Bài 10: Điều khiển Servo SG90 qua Web Server
Bài học này sẽ hướng dẫn cách điều khiển Servo SG90 bằng ESP32 thông qua giao diện Web. Dùng thanh trượt để thay đổi góc quay Servo theo thời gian thực.