
ESP32-S3 là một trong những vi điều khiển mạnh mẽ thuộc hệ sinh thái ESP32 của Espressif, được thiết kế cho các ứng dụng IoT, AIoT, điều khiển thiết bị, xử lý tín hiệu và giao tiếp không dây. Điểm nổi bật của ESP32-S3 là kiến trúc dual-core, tức có hai lõi xử lý 32-bit Xtensa LX7 hoạt động cùng nhau, giúp thiết bị có thể xử lý nhiều tác vụ song song hiệu quả hơn so với các vi điều khiển một lõi truyền thống.
Trong các dự án IoT thực tế, một thiết bị thường không chỉ làm một việc duy nhất. Nó có thể vừa đọc cảm biến, vừa điều khiển relay hoặc motor, vừa cập nhật màn hình, vừa gửi dữ liệu lên MQTT Cloud, vừa duy trì kết nối Wi-Fi. Nếu tất cả tác vụ này cùng chạy trên một lõi xử lý, hệ thống rất dễ bị chậm, giật, mất phản hồi hoặc thậm chí reset do watchdog.
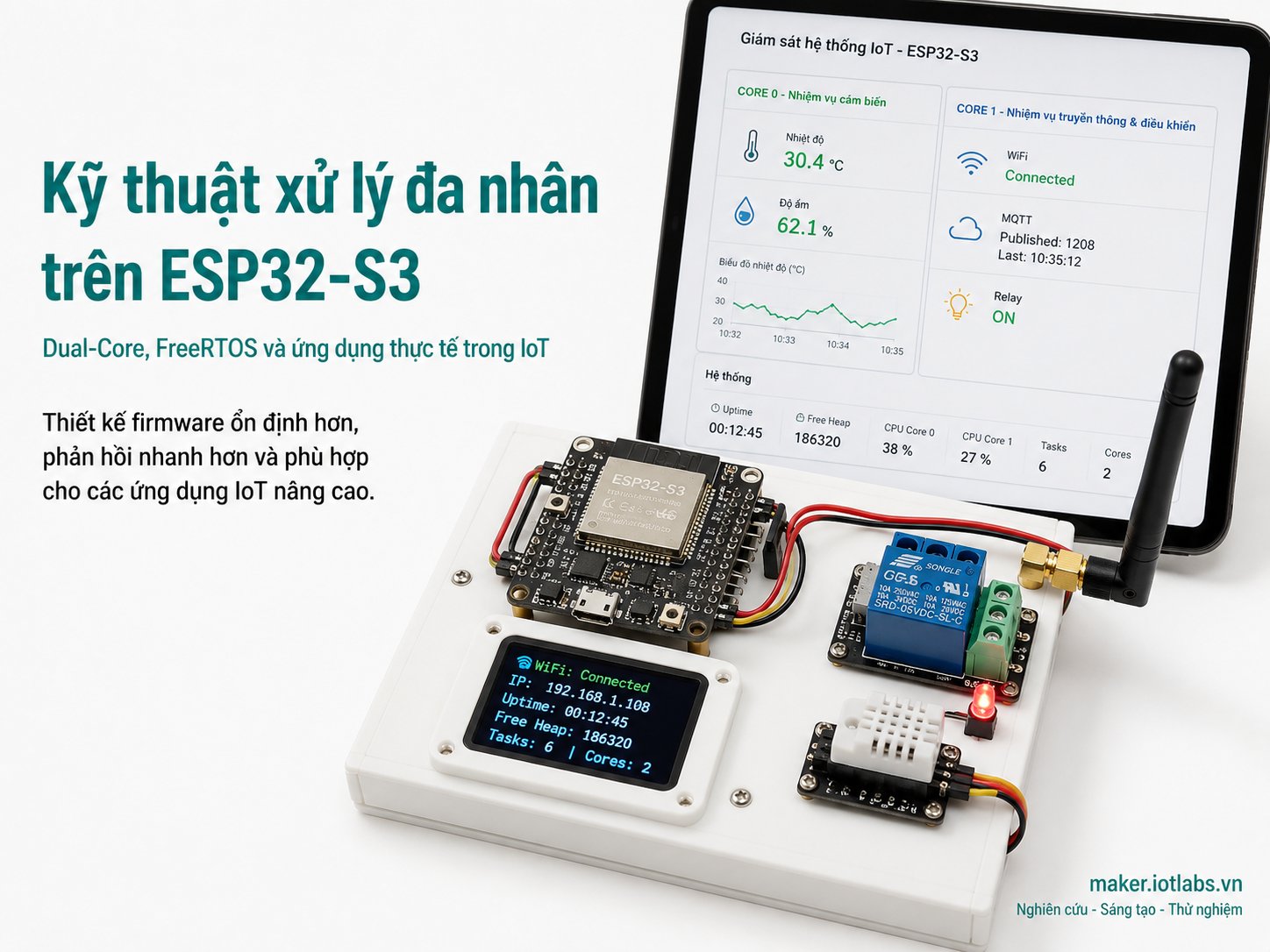
Đó là lý do kỹ thuật xử lý đa nhân trên ESP32-S3 rất quan trọng. Khi hiểu đúng cách sử dụng dual-core và FreeRTOS, bạn có thể thiết kế firmware ổn định hơn, phản hồi nhanh hơn và phù hợp hơn cho các ứng dụng IoT nâng cao.
ESP32-S3 dual-core là gì?
ESP32-S3 sử dụng bộ xử lý Xtensa LX7 32-bit lõi kép, có thể chạy ở xung nhịp lên đến 240 MHz. Hai lõi xử lý này thường được gọi là:
- Core 0 / PRO_CPU
- Core 1 / APP_CPU
Trong nhiều dự án ESP32-S3, Core 0 thường được dùng nhiều cho các tác vụ hệ thống, Wi-Fi, Bluetooth Low Energy và network stack. Core 1 thường được dùng cho logic ứng dụng của người dùng như đọc cảm biến, xử lý dữ liệu, điều khiển thiết bị hoặc cập nhật giao diện.
Tuy nhiên, cần hiểu rằng hai lõi này không bị chia cứng theo kiểu “Core 0 chỉ chạy Wi-Fi, Core 1 chỉ chạy code người dùng”. Trên thực tế, ESP-IDF FreeRTOS hỗ trợ cơ chế lập lịch đa nhiệm, cho phép task có thể được gán vào một core cụ thể hoặc cho phép hệ thống tự phân phối task theo cấu hình.
Nói đơn giản, ESP32-S3 dual-core giúp thiết bị có thể làm nhiều việc cùng lúc tốt hơn, nhưng để tận dụng hiệu quả, người lập trình cần biết cách chia task, pin task vào core phù hợp và quản lý tài nguyên dùng chung.
Vì sao dual-core quan trọng trong dự án IoT?
Trong một dự án IoT thực tế, ESP32-S3 có thể phải xử lý nhiều nhóm công việc cùng lúc:
- Duy trì kết nối Wi-Fi.
- Gửi dữ liệu qua MQTT hoặc HTTP.
- Đọc cảm biến theo chu kỳ.
- Điều khiển relay, motor, servo hoặc buzzer.
- Cập nhật màn hình OLED, LCD hoặc TFT.
- Xử lý dữ liệu âm thanh, hình ảnh hoặc tín hiệu đơn giản.
- Ghi log hoặc lưu dữ liệu tạm thời.
- Phản hồi nút nhấn hoặc tín hiệu từ người dùng.
Nếu tất cả các tác vụ này được viết trong một vòng loop() duy nhất, chương trình rất dễ bị rối và khó kiểm soát. Ví dụ, khi một đoạn code xử lý cảm biến chạy quá lâu, việc gửi dữ liệu MQTT có thể bị trễ. Khi cập nhật màn hình mất nhiều thời gian, việc đọc nút nhấn có thể không còn chính xác. Khi một tác vụ bị block, toàn bộ hệ thống có thể mất phản hồi.
Dual-core giúp giải quyết vấn đề này bằng cách tách các nhóm công việc ra thành nhiều task độc lập. Một core có thể ưu tiên xử lý giao tiếp mạng, trong khi core còn lại xử lý logic ứng dụng. Nhờ vậy, hệ thống chạy mượt hơn và giảm nguy cơ một tác vụ nặng làm ảnh hưởng toàn bộ chương trình.
FreeRTOS trên ESP32-S3 hoạt động như thế nào?
ESP32-S3 sử dụng FreeRTOS trong ESP-IDF. Đây là hệ điều hành thời gian thực giúp chia chương trình thành nhiều task nhỏ. Mỗi task có thể chạy độc lập, có độ ưu tiên riêng và có thể được scheduler phân phối để chạy trên core phù hợp.
Với ESP32-S3, FreeRTOS hỗ trợ cơ chế SMP, tức Symmetric Multiprocessing. Điều này có nghĩa là hai core có thể cùng tham gia xử lý task. Một task có thể được ghim vào một core cụ thể, hoặc được để tự do để hệ thống sắp xếp chạy trên core phù hợp.
Có ba hướng sử dụng phổ biến:
1. Chạy task mặc định trong loop()
Nếu bạn lập trình bằng Arduino IDE, phần lớn người mới sẽ viết toàn bộ chương trình trong setup() và loop(). Cách này đơn giản, phù hợp với dự án nhỏ, nhưng không tối ưu cho các dự án nhiều tác vụ.
Ví dụ:
void setup() {
Serial.begin(115200);
}
void loop() {
readSensor();
sendDataToCloud();
updateDisplay();
delay(1000);
}
Cách viết này dễ hiểu nhưng có nhược điểm: các tác vụ chạy tuần tự. Nếu sendDataToCloud() bị chậm hoặc mất kết nối mạng, các tác vụ khác cũng bị ảnh hưởng.
2. Tạo task riêng bằng FreeRTOS
Thay vì viết tất cả trong loop(), bạn có thể tách từng nhóm công việc thành task riêng. Ví dụ:
- Task đọc cảm biến.
- Task gửi MQTT.
- Task cập nhật màn hình.
- Task xử lý nút nhấn.
- Task điều khiển motor.
Mỗi task có thể chạy theo chu kỳ riêng, có độ ưu tiên riêng và không cần phụ thuộc hoàn toàn vào vòng loop().
3. Pin task vào core cụ thể
ESP32-S3 cho phép gán task vào một core cụ thể bằng hàm:
xTaskCreatePinnedToCore()
Hoặc dùng phiên bản cấp phát tĩnh:
xTaskCreateStaticPinnedToCore()
Tham số core thường dùng:
0 // Core 0 / PRO_CPU
1 // Core 1 / APP_CPU
tskNO_AFFINITY // Không ghim vào core cụ thể
Khi dùng đúng cách, bạn có thể tách tác vụ mạng và tác vụ xử lý ứng dụng để hệ thống ổn định hơn.
Ví dụ chia task trên ESP32-S3
Ví dụ dưới đây minh họa cách tạo hai task trên ESP32-S3:
- Core 0: xử lý tác vụ mạng giả lập.
- Core 1: đọc cảm biến giả lập.
#include <Arduino.h>
void networkTask(void *parameter) {
while (true) {
Serial.print("Network task running on core: ");
Serial.println(xPortGetCoreID());
// Ví dụ: xử lý Wi-Fi, MQTT, HTTP request
delay(1000);
}
}
void sensorTask(void *parameter) {
while (true) {
Serial.print("Sensor task running on core: ");
Serial.println(xPortGetCoreID());
// Ví dụ: đọc cảm biến, xử lý dữ liệu
delay(500);
}
}
void setup() {
Serial.begin(115200);
delay(1000);
xTaskCreatePinnedToCore(
networkTask,
"Network Task",
4096,
NULL,
1,
NULL,
0
);
xTaskCreatePinnedToCore(
sensorTask,
"Sensor Task",
4096,
NULL,
1,
NULL,
1
);
}
void loop() {
// Có thể để trống nếu logic chính đã tách thành task
delay(1000);
}
Trong ví dụ này, networkTask được ghim vào Core 0, còn sensorTask được ghim vào Core 1. Hàm xPortGetCoreID() giúp kiểm tra task hiện tại đang chạy trên core nào.
Đây chỉ là ví dụ đơn giản để hiểu cơ chế dual-core. Trong dự án thực tế, bạn nên dùng thêm queue, mutex hoặc semaphore để truyền dữ liệu an toàn giữa các task.
Khi nào nên dùng xTaskCreatePinnedToCore?
Bạn nên dùng xTaskCreatePinnedToCore() khi muốn kiểm soát rõ task nào chạy trên core nào. Cách này phù hợp trong các trường hợp:
- Tách tác vụ mạng khỏi tác vụ xử lý cảm biến.
- Tách điều khiển motor khỏi giao diện web.
- Tách xử lý âm thanh khỏi cập nhật màn hình.
- Tách camera hoặc xử lý hình ảnh khỏi web server.
- Cần giảm độ trễ cho một tác vụ quan trọng.
- Cần tránh một task nặng làm ảnh hưởng task khác.
Ví dụ, trong hệ thống giám sát kho lạnh, bạn có thể chia như sau:
| Nhóm tác vụ | Core đề xuất | Mục đích |
|---|---|---|
| Wi-Fi, MQTT, gửi dữ liệu cloud | Core 0 | Duy trì kết nối ổn định |
| Đọc cảm biến nhiệt độ, độ ẩm | Core 1 | Thu thập dữ liệu đều đặn |
| Xử lý cảnh báo ngưỡng | Core 1 | Phản hồi nhanh khi có bất thường |
| Cập nhật màn hình OLED/TFT | Core 1 | Hiển thị dữ liệu tại chỗ |
| Ghi log hoặc buffer dữ liệu | Tùy thiết kế | Tránh mất dữ liệu khi mất mạng |
Cách chia này giúp firmware dễ bảo trì hơn và giảm nguy cơ nghẽn xử lý.
Những lỗi thường gặp khi lập trình dual-core trên ESP32-S3
1. Cho rằng càng nhiều task càng tốt
Dual-core không có nghĩa là nên tạo thật nhiều task. Mỗi task đều cần stack, bộ nhớ và thời gian lập lịch. Nếu tạo quá nhiều task không cần thiết, chương trình có thể tốn RAM, khó debug và dễ sinh lỗi.
Cách tốt hơn là chia task theo nhóm chức năng rõ ràng. Ví dụ: một task cho network, một task cho sensor, một task cho display là đủ cho nhiều dự án cơ bản.
2. Dùng biến toàn cục giữa nhiều task mà không bảo vệ
Khi hai task cùng đọc và ghi một biến toàn cục, lỗi dữ liệu có thể xảy ra. Ví dụ, task đọc cảm biến ghi giá trị nhiệt độ, trong khi task MQTT đọc giá trị đó để gửi lên cloud. Nếu không đồng bộ đúng cách, dữ liệu có thể bị sai hoặc không nhất quán.
Nên dùng:
- Queue để truyền dữ liệu giữa task.
- Mutex để bảo vệ tài nguyên dùng chung.
- Semaphore để đồng bộ tín hiệu.
- Critical section trong trường hợp cần bảo vệ đoạn code rất ngắn.
3. Dùng delay quá dài hoặc code blocking
Các hàm blocking như delay quá dài, vòng lặp vô hạn không có vTaskDelay(), chờ Wi-Fi quá lâu hoặc xử lý dữ liệu nặng trong một task có thể làm hệ thống kém ổn định.
Trong FreeRTOS, task nên biết “nhường quyền xử lý” cho scheduler bằng các hàm như:
vTaskDelay(pdMS_TO_TICKS(100));
Thay vì viết vòng lặp chiếm CPU liên tục.
4. Ghim sai task vào Core 0
Core 0 thường có nhiều tác vụ hệ thống và network stack. Nếu bạn ghim một task nặng, chạy liên tục hoặc có độ ưu tiên cao vào Core 0, hệ thống mạng có thể bị ảnh hưởng.
Với nhiều dự án IoT, cách an toàn là để Core 0 xử lý nhiều phần liên quan đến network, còn các tác vụ ứng dụng nặng hơn nên đưa sang Core 1. Tuy nhiên, đây là nguyên tắc thực hành phổ biến, không phải quy định cứng trong mọi trường hợp.
5. Không theo dõi watchdog
Watchdog giúp phát hiện task bị treo hoặc không nhường CPU trong thời gian dài. Nếu chương trình bị reset với lỗi watchdog, nguyên nhân thường là do task chạy quá lâu, vòng lặp bị block hoặc không có delay/yield phù hợp.
Khi gặp lỗi này, cần kiểm tra:
- Task nào đang chạy quá lâu.
- Có vòng lặp
while(true)nào thiếuvTaskDelay()không. - Có tác vụ network nào bị chờ vô hạn không.
- Có xử lý nặng nào nên tách sang task riêng không.
Ứng dụng thực tế của dual-core ESP32-S3
1. ESP32-S3 làm web server điều khiển thiết bị
Trong hệ thống nhà thông minh, ESP32-S3 có thể chạy web server để nhận lệnh bật/tắt relay. Một core có thể xử lý network và request từ trình duyệt, core còn lại xử lý relay, cảm biến và trạng thái thiết bị.
Nhờ vậy, khi người dùng bấm nút trên giao diện web, thiết bị vẫn phản hồi nhanh ngay cả khi đang đọc cảm biến hoặc cập nhật màn hình.
2. ESP32-S3 gửi dữ liệu MQTT lên cloud
Với các dự án IoT Cloud, ESP32-S3 thường phải giữ kết nối Wi-Fi và MQTT ổn định. Nếu task đọc cảm biến hoặc xử lý dữ liệu làm block chương trình, MQTT có thể mất kết nối.
Một thiết kế hợp lý là tạo task riêng cho MQTT và task riêng cho cảm biến. Task cảm biến gửi dữ liệu qua queue, task MQTT nhận dữ liệu từ queue và gửi lên cloud. Cách này giúp chương trình rõ ràng và ổn định hơn.
3. ESP32-S3 xử lý màn hình TFT hoặc OLED
Cập nhật màn hình có thể mất thời gian, đặc biệt với TFT màu hoặc giao diện nhiều thành phần. Nếu cập nhật màn hình trong cùng luồng xử lý network, thiết bị có thể phản hồi chậm.
Tách display task riêng giúp giao diện mượt hơn và không làm ảnh hưởng đến việc gửi nhận dữ liệu.
4. ESP32-S3 trong robot mini
Trong robot tự hành, ESP32-S3 có thể vừa đọc cảm biến khoảng cách, vừa điều khiển motor, vừa nhận lệnh từ Wi-Fi hoặc Bluetooth LE. Dual-core giúp tách phần điều khiển chuyển động khỏi phần giao tiếp, giảm độ trễ khi robot cần phản ứng với vật cản.
Ví dụ:
| Tác vụ | Core đề xuất |
|---|---|
| Nhận lệnh điều khiển qua Wi-Fi/BLE | Core 0 |
| Đọc cảm biến khoảng cách | Core 1 |
| Tính toán hướng di chuyển | Core 1 |
| Điều khiển motor | Core 1 |
5. ESP32-S3 trong AIoT nhẹ
ESP32-S3 có thể dùng trong các bài toán AIoT nhẹ như nhận dạng từ khóa đơn giản, xử lý tín hiệu cảm biến hoặc phân loại dữ liệu nhỏ. Trong trường hợp này, một core có thể xử lý phần giao tiếp, core còn lại xử lý thuật toán.
Tuy nhiên, ESP32-S3 vẫn là vi điều khiển, không phải máy tính nhúng mạnh như Raspberry Pi. Vì vậy, với các mô hình AI lớn, camera AI nặng hoặc xử lý hình ảnh phức tạp, bạn nên cân nhắc dùng Raspberry Pi, Jetson hoặc một thiết bị edge AI mạnh hơn.
So sánh ESP32-S3 dual-core và vi điều khiển single-core
| Tiêu chí | ESP32-S3 dual-core | Vi điều khiển single-core |
|---|---|---|
| Số lõi xử lý | 2 core | 1 core |
| Khả năng đa nhiệm | Tốt hơn, phù hợp nhiều task song song | Hạn chế hơn |
| Wi-Fi và logic ứng dụng | Có thể tách task hợp lý | Dễ bị ảnh hưởng lẫn nhau |
| Độ ổn định khi xử lý nhiều việc | Tốt hơn nếu thiết kế đúng | Dễ nghẽn nếu code blocking |
| Độ phức tạp lập trình | Cao hơn vì cần hiểu FreeRTOS | Đơn giản hơn |
| Phù hợp dự án | IoT nâng cao, robot, display, MQTT, AIoT nhẹ | Cảm biến đơn giản, điều khiển cơ bản |
| Debug | Cần theo dõi task, stack, core, watchdog | Dễ hơn với chương trình nhỏ |
ESP32-S3 dual-core không tự động làm chương trình nhanh hơn nếu code được thiết kế kém. Lợi ích thật sự đến từ cách bạn chia task, quản lý tài nguyên dùng chung và tránh blocking code.
Best practices khi dùng dual-core trên ESP32-S3
Để firmware ESP32-S3 chạy ổn định, bạn nên áp dụng các nguyên tắc sau:
- Không viết toàn bộ logic trong một vòng
loop()lớn. - Chia chương trình thành các task theo chức năng.
- Không tạo quá nhiều task nếu không cần thiết.
- Dùng queue để truyền dữ liệu giữa task.
- Dùng mutex khi nhiều task cùng truy cập tài nguyên chung.
- Tránh blocking code trong task quan trọng.
- Dùng
vTaskDelay()thay vì vòng lặp chiếm CPU liên tục. - Theo dõi log watchdog khi hệ thống bị reset.
- Ưu tiên để task network chạy ổn định.
- Đo thực tế bằng Serial log trước khi tối ưu sâu.
Một cấu trúc đơn giản cho dự án IoT có thể là:
Core 0:
- Wi-Fi task
- MQTT task
- Web server task
Core 1:
- Sensor task
- Display task
- Control logic task
Đây là mô hình dễ hiểu, phù hợp cho người mới bắt đầu làm các dự án IoT nhiều chức năng.
Khi nào không cần dùng dual-core?
Không phải dự án nào cũng cần lập trình dual-core phức tạp. Nếu dự án chỉ đọc một cảm biến, bật tắt một relay hoặc gửi dữ liệu mỗi vài giây, bạn có thể viết bằng setup() và loop() như Arduino thông thường.
Bạn chỉ nên tách task và pin core khi:
- Chương trình bắt đầu có nhiều tác vụ chạy song song.
- Wi-Fi/MQTT thường xuyên bị mất kết nối.
- Màn hình cập nhật bị giật.
- Đọc cảm biến bị trễ.
- Motor hoặc relay phản hồi chậm.
- Chương trình bị watchdog reset.
- Code trong
loop()ngày càng dài và khó kiểm soát.
Nói cách khác, dual-core là công cụ để giải quyết vấn đề thực tế, không phải kỹ thuật cần dùng trong mọi chương trình.
Kết luận
ESP32-S3 là một vi điều khiển rất phù hợp cho các dự án IoT hiện đại nhờ kiến trúc dual-core Xtensa LX7, Wi-Fi, Bluetooth Low Energy và hệ sinh thái phần mềm mạnh mẽ. Khi biết cách sử dụng FreeRTOS, tạo task riêng và pin task vào core phù hợp, bạn có thể xây dựng firmware ổn định hơn, phản hồi nhanh hơn và dễ mở rộng hơn.
Điểm quan trọng nhất là không nên hiểu dual-core theo kiểu “cứ có hai core là chương trình tự chạy nhanh”. Hiệu quả của xử lý đa nhân phụ thuộc vào cách thiết kế phần mềm. Nếu chia task hợp lý, tránh blocking code và đồng bộ dữ liệu đúng cách, ESP32-S3 có thể xử lý tốt nhiều bài toán IoT như MQTT Cloud, web server, robot mini, màn hình TFT, cảm biến thông minh và các ứng dụng AIoT nhẹ.
Với người mới học ESP32-S3, cách tiếp cận tốt nhất là bắt đầu từ một ví dụ đơn giản: tạo hai task, cho mỗi task chạy trên một core khác nhau, in ra xPortGetCoreID() để quan sát. Sau đó, bạn có thể nâng cấp dần thành mô hình thực tế hơn như một task đọc cảm biến và một task gửi dữ liệu lên cloud.
📚 Series: Sức Mạnh ESP32-S3 Dual-Core
⬅️ Bài trước: S3 Dual-Core – Bài 8: Edge AI – ESP-DSP, ESP-NN Giới Hạn Thực Tế
➡️ Bài tiếp theo: S3 Dual-Core – Bài 9: Project Camera + LCD + Dual-Core