Uncategorized
-
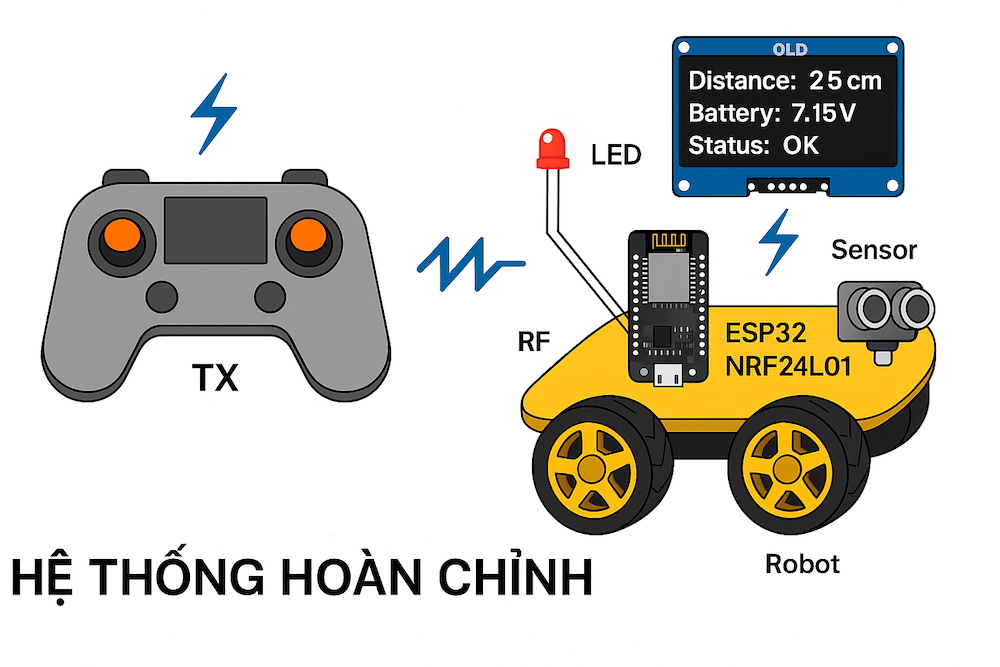
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 7): Kiểm thử & demo thực tế
Bài học hướng dẫn kiểm thử và demo thực tế hệ thống robot điều khiển từ xa dùng NRF24L01. Bao gồm truyền 2 chiều, báo hiệu thông minh, và tối ưu phản hồi điều khiển trong môi trường thực tế.
-
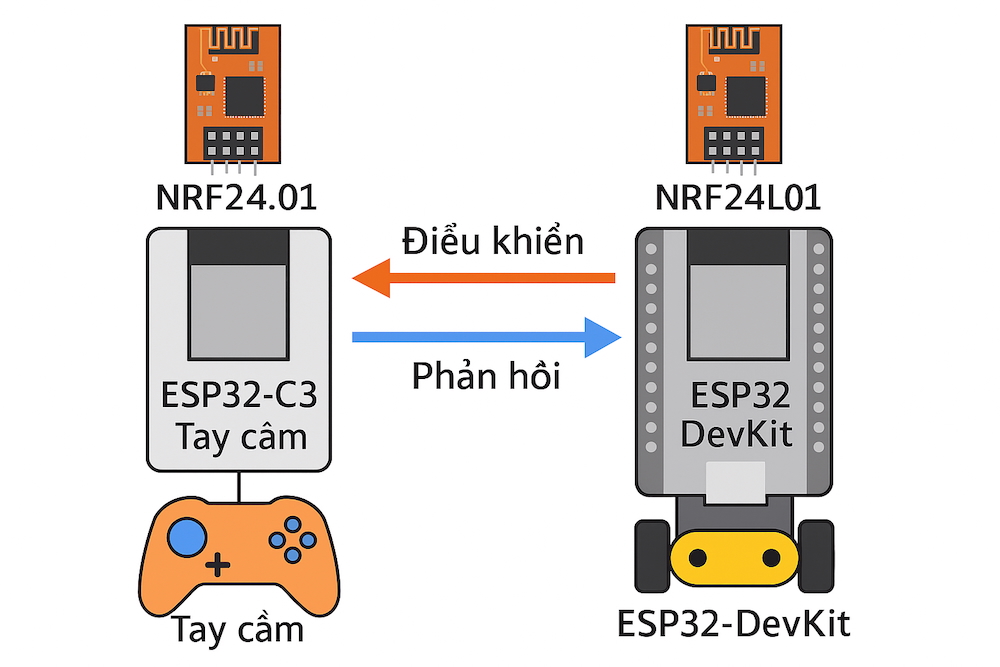
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 6): Truyền dữ liệu 2 chiều
Bài học hướng dẫn cách lập trình truyền dữ liệu hai chiều giữa tay cầm và robot dùng NRF24L01. Robot gửi dữ liệu cảm biến và pin về tay cầm giúp điều khiển thông minh hơn.
-
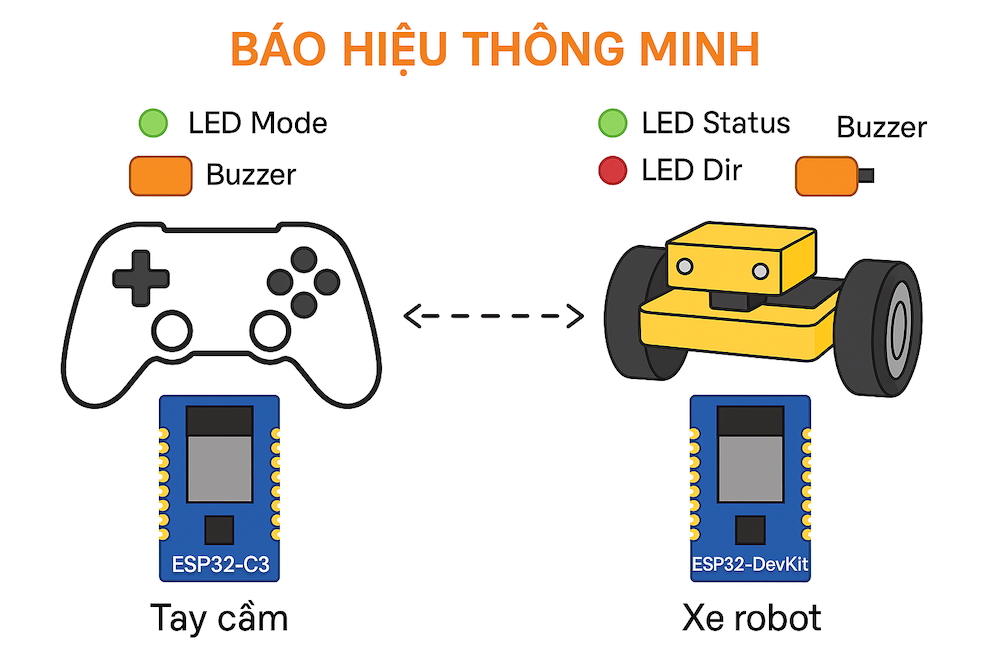
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 5): Báo hiệu thông minh
Bài học hướng dẫn thêm hệ thống báo hiệu thông minh bằng LED và buzzer cho robot điều khiển từ xa. Robot có thể phản hồi trạng thái hoạt động, mất kết nối và chế độ điều khiển.
-
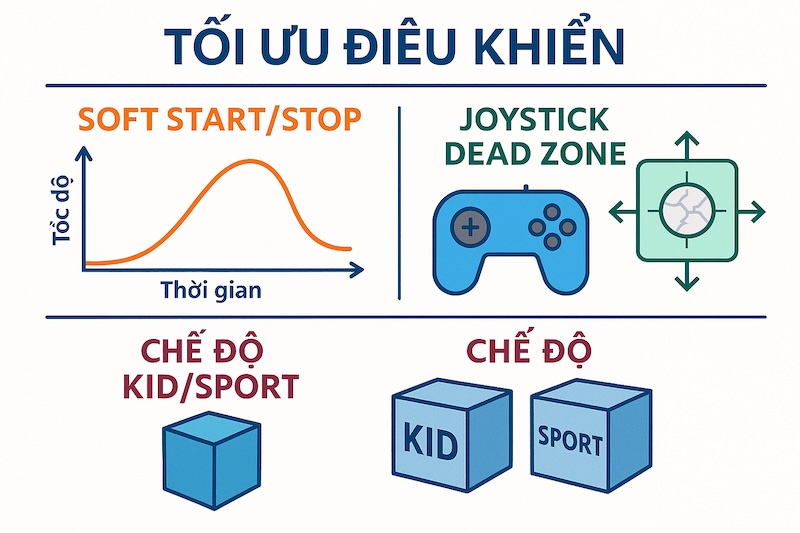
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 4): Tối ưu điều khiển
Bài học hướng dẫn tối ưu điều khiển robot từ xa dùng NRF24L01. Giúp xe chạy mượt, ổn định và phản hồi nhanh nhờ kỹ thuật Soft Start, Dead Zone và chế độ Kid/Sport.
-
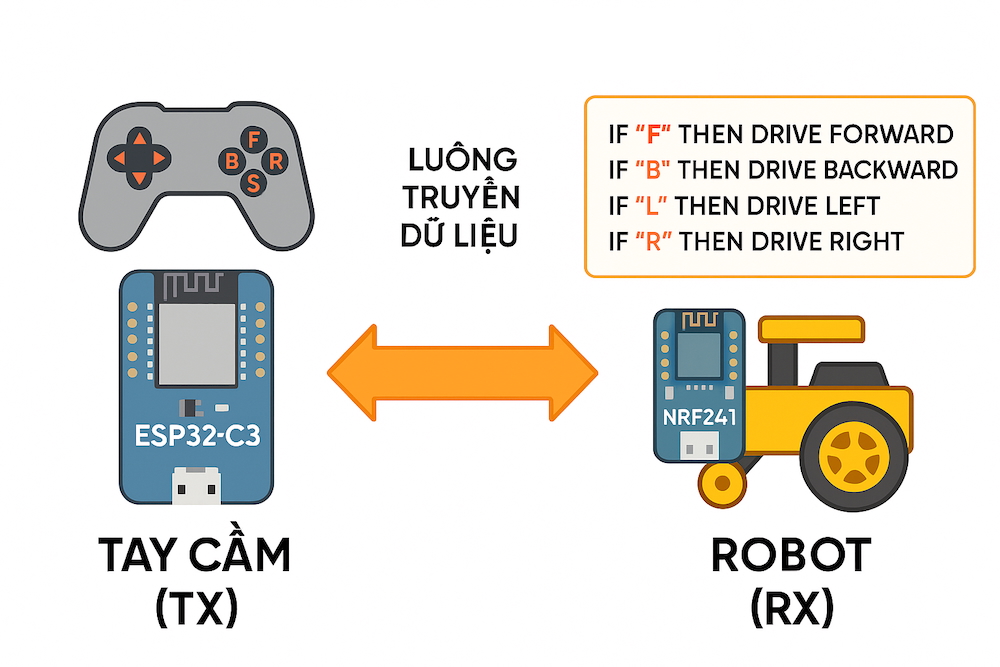
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 3): Lập trình cơ bản
Bài học hướng dẫn lập trình cơ bản cho tay cầm và xe robot dùng NRF24L01. Tay cầm gửi lệnh điều khiển, xe nhận và thực thi di chuyển qua driver L298N.
-
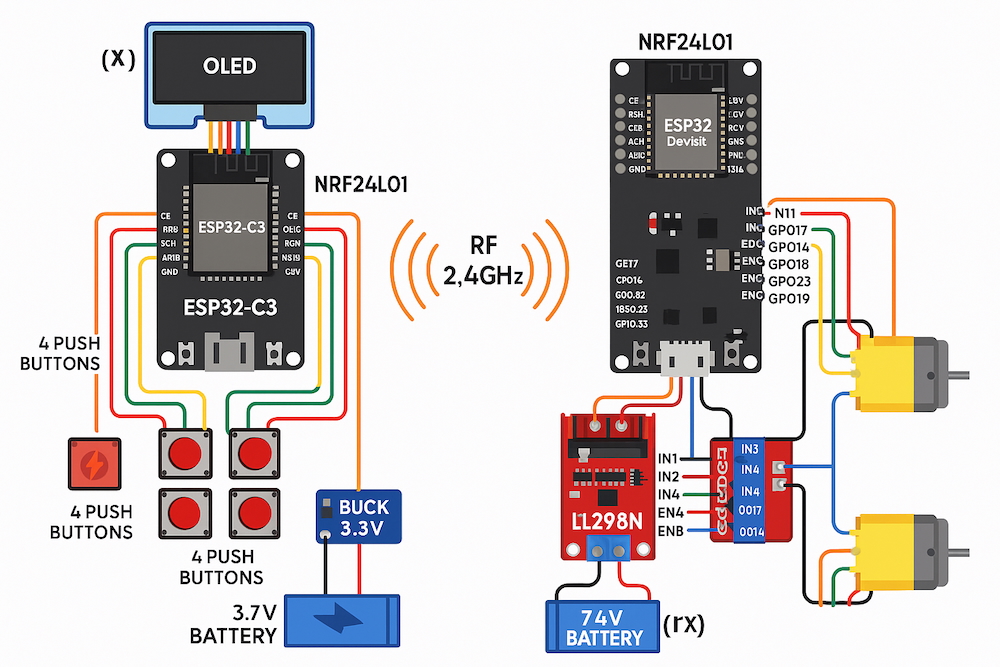
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 2): Thiết kế phần cứng
Bài học hướng dẫn thiết kế và lắp ráp phần cứng cho hệ thống điều khiển robot từ xa sử dụng NRF24L01, bao gồm tay cầm ESP32-C3 và xe robot ESP32 DevKit điều khiển động cơ L298N.
-
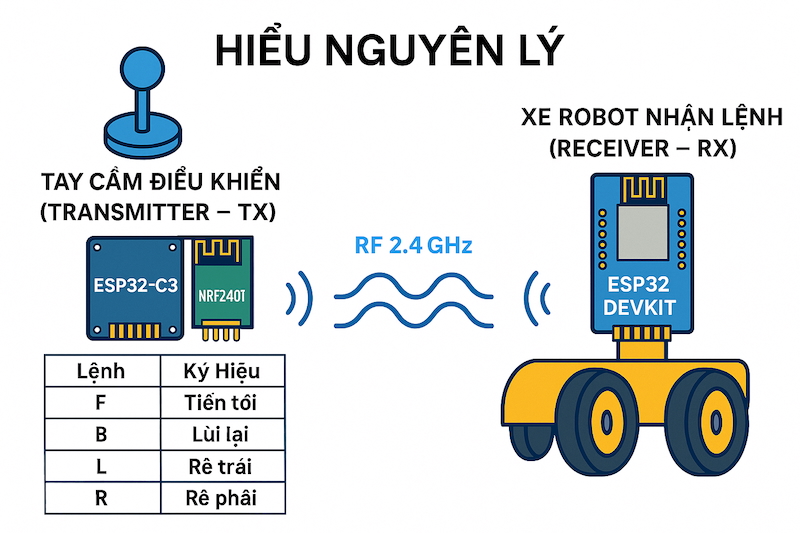
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 1): Hiểu nguyên lý
Bài học này giúp bạn hiểu nguyên lý điều khiển robot từ xa qua sóng RF 2.4GHz sử dụng module NRF24L01, chuẩn bị cho phần thiết kế phần cứng và lập trình thực tế.
-

Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot
Phần nâng cao hướng dẫn thiết kế và lập trình bộ điều khiển robot không dây bằng NRF24L01, giúp bạn xây dựng hệ thống truyền – nhận lệnh RF hoàn chỉnh giữa tay cầm và xe robot.
-
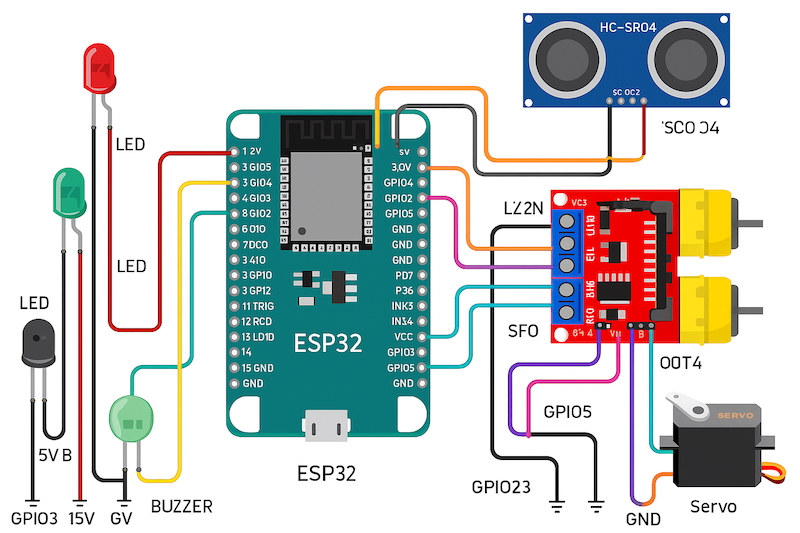
Lập trình & Điều khiển Động Cơ – Bài 115: Tích hợp còi cảnh báo và đèn LED vào xe robot (Báo hiệu trạng thái thông minh)
Bài 15 hướng dẫn tích hợp còi buzzer và đèn LED vào xe robot dùng ESP32, giúp robot giúp robot tương tác thông minh hơn, phát tín hiệu âm thanh và ánh sáng khi gặp vật cản hoặc di chuyển an toàn.
-
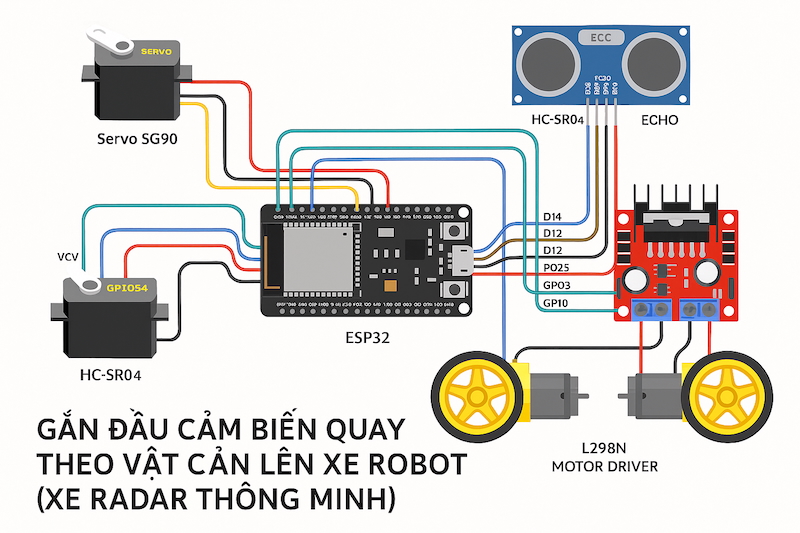
Lập trình & Điều khiển Động Cơ – Bài 14: Lăp ráp đầu cảm biến quay theo vật cản lên xe robot (Xe radar thông minh)
Bài 14 hướng dẫn gắn hệ thống radar servo + HC-SR04 lên xe robot để xe tự quét vật cản và chọn hướng đi an toàn bằng ESP32.