
cảm biến siêu âm HC-SR04
-
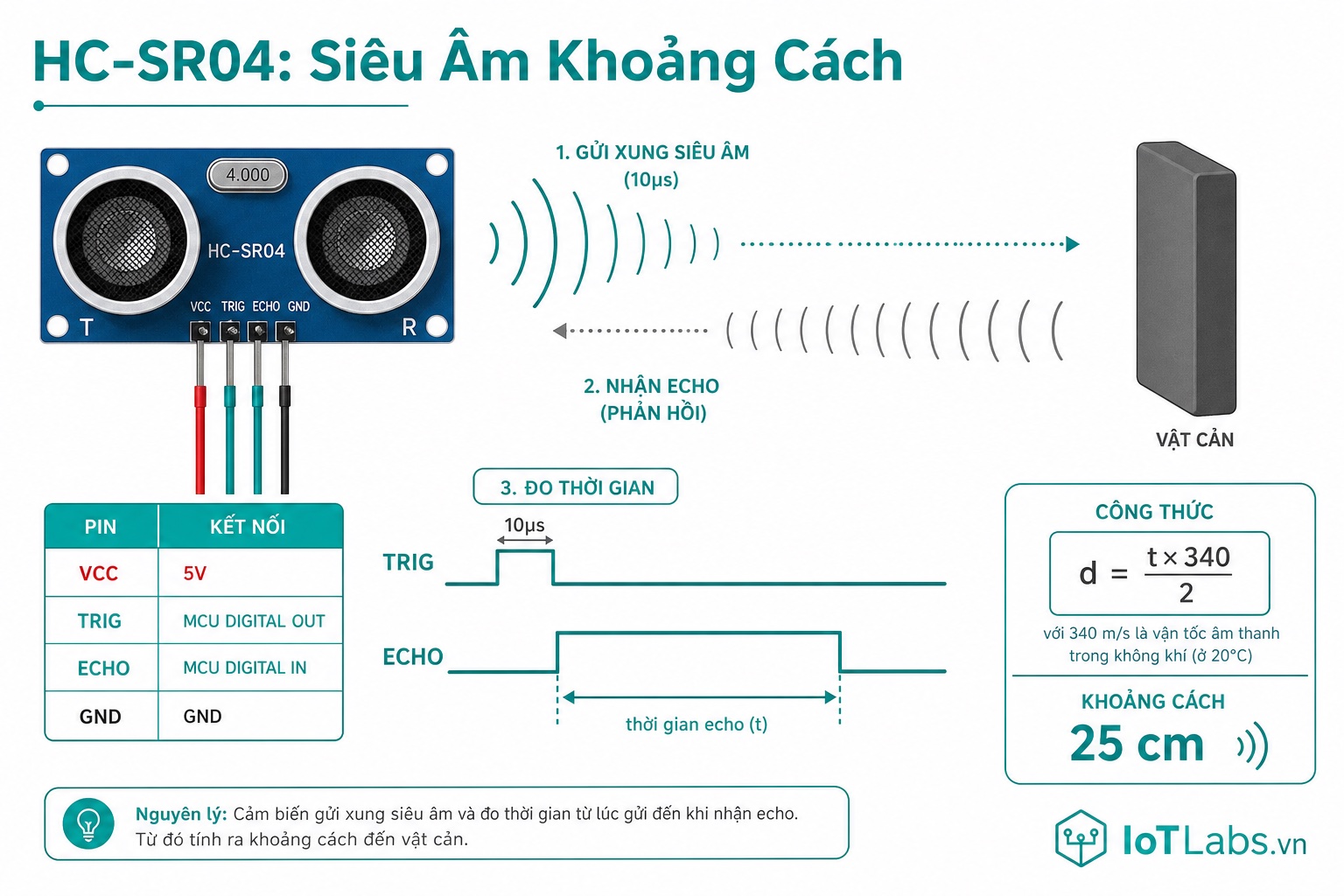
Series 37 Module Cảm Biến – Nguyên Lý Hoạt Động HC-SR04: Sóng Siêu Âm 40kHz, Thời Gian Bay & Đo Khoảng Cách Chính Xác
Phân tích HC-SR04: piezoelectric transducer 40kHz, chuỗi 8 xung trigger, đo thời gian Echo HIGH, công thức tốc độ âm thanh 343m/s. Vùng mù 2cm, góc 15°, thời gian 60ms giữa hai lần đo. Code Arduino và ESP32.
-
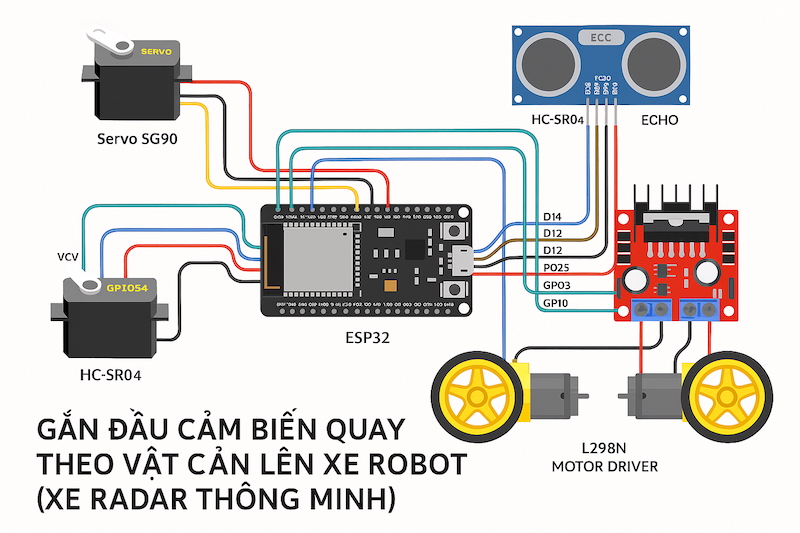
Lập trình & Điều khiển Động Cơ – Bài 14: Lăp ráp đầu cảm biến quay theo vật cản lên xe robot (Xe radar thông minh)
Bài 14 hướng dẫn gắn hệ thống radar servo + HC-SR04 lên xe robot để xe tự quét vật cản và chọn hướng đi an toàn bằng ESP32.
-
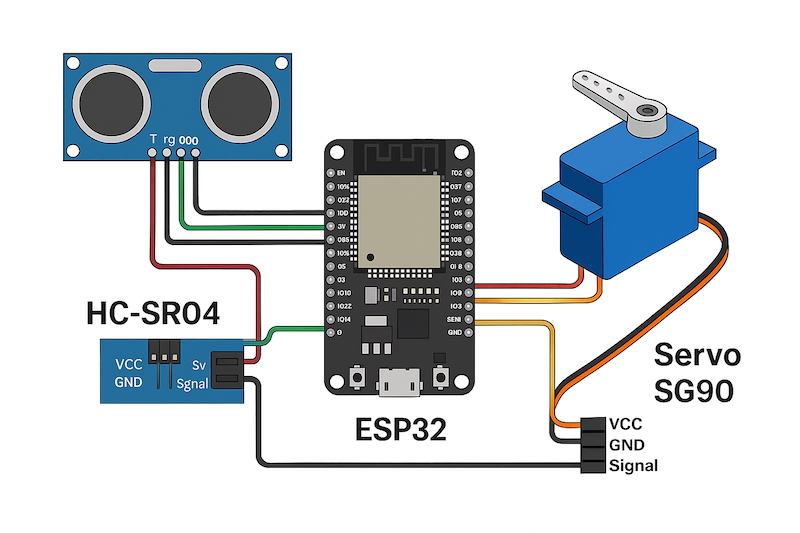
Lập trình & Điều khiển Động Cơ – Bài 12: Kết hợp Servo và Cảm biến siêu âm HC-SR04 – Quay theo vật cản (Radar mini)
Bài 12 hướng dẫn kết hợp Servo SG90 và cảm biến siêu âm HC-SR04 để tạo radar mini, giúp robot quét góc 180° và đo khoảng cách theo từng hướng.
-
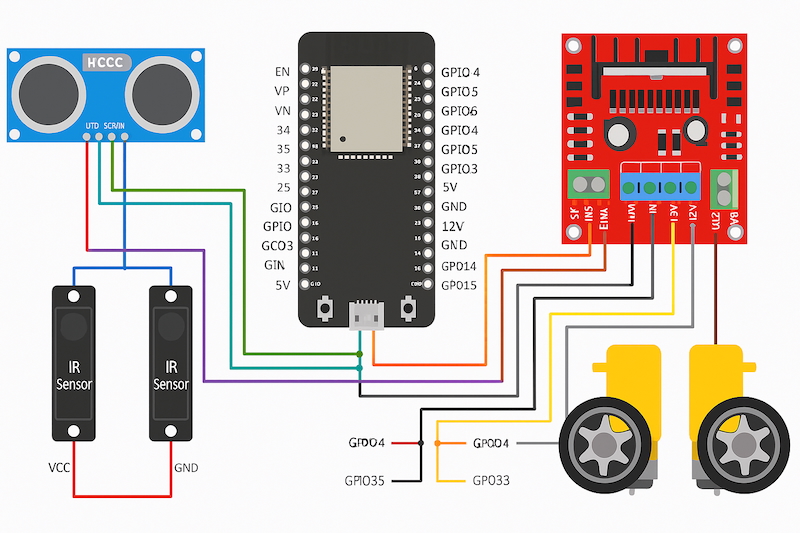
Lập trình & Điều khiển Động Cơ – Bài 10: Xe robot tránh vật cản kết hợp dò line (robot tự hành thông minh)
Bài 10 hướng dẫn lập trình xe robot thông minh vừa dò line vừa tránh vật cản bằng ESP32, HC-SR04 và cảm biến hồng ngoại, giúp robot tự hành thông minh hơn.
-
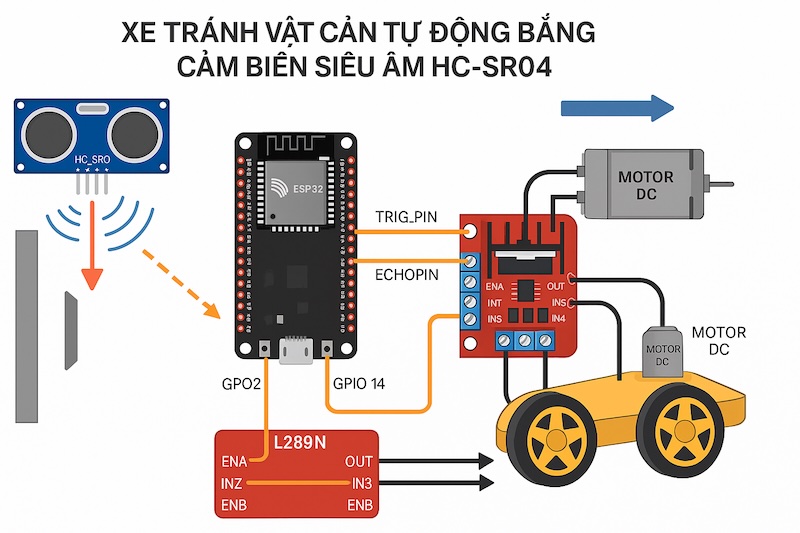
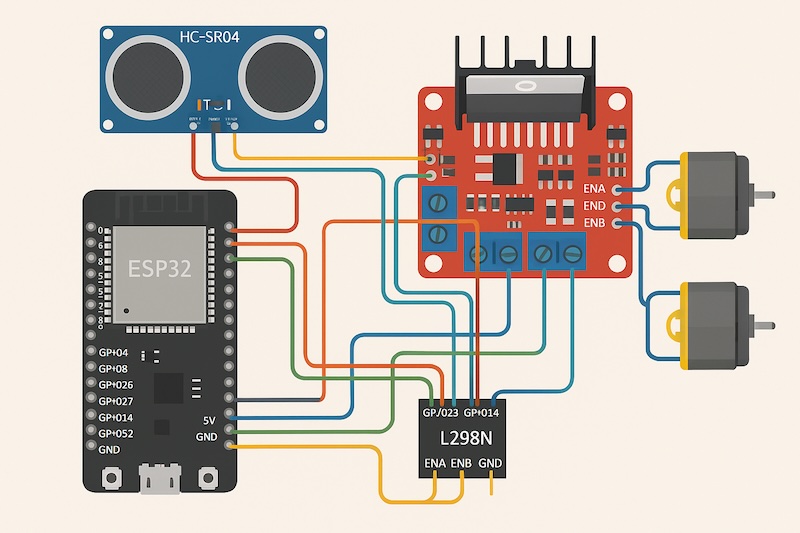
Lập trình & Điều khiển Động Cơ – Bài 6: Xe tránh vật cản tự động bằng cảm biến siêu âm HC-SR04
Bài 6 hướng dẫn lập trình xe robot tự tránh vật cản thông minh, linh hoạt bằng cảm biến siêu âm HC-SR04, sử dụng ESP32 và L298N.
-
Lập trình & Điều khiển Động Cơ – Bài 5: Cảm biến vật cản cho xe robot (Tự dừng khi gặp chướng ngại vật)
Bài 5 hướng dẫn chi tiết cách dùng cảm biến siêu âm HC-SR04 để phát hiện vật cản và lập trình xe robot tránh chướng ngại vật thông minh.