
Tại Sao Cần Hiểu Kiến Trúc CPU?
Nhiều người biết ESP32-S3 có 2 core nhưng firmware của họ vẫn chạy đơn luồng trên Core 1, Core 0 bỏ không. Hoặc tệ hơn: họ chạy task trên Core 0 nhưng xung đột với WiFi stack và sinh ra các lỗi ngẫu nhiên khó debug.
Hiểu đúng kiến trúc CPU giúp bạn:
- Phân chia task đúng core, tránh xung đột WiFi
- Tận dụng cache để code chạy nhanh hơn không cần tăng tần số
- Debug watchdog timeout và stack overflow đúng nguyên nhân
- Thiết kế firmware mở rộng được khi thêm tính năng mới
Xtensa LX7: Thế Hệ Mới Hơn LX6
ESP32 gốc dùng Xtensa LX6, ESP32-S3 dùng Xtensa LX7. Sự khác biệt không chỉ ở số phiên bản:
| Đặc điểm | Xtensa LX6 (ESP32) | Xtensa LX7 (ESP32-S3) |
|---|---|---|
| Pipeline stages | 5 | 7 |
| Instruction cache | 32 KB (chia 2 core) | 32 KB mỗi core (riêng) |
| Data cache | 8 KB | 8 KB mỗi core (riêng) |
| SIMD instructions | Không | Có (PIE — 128-bit) |
| Branch prediction | Cơ bản | Cải tiến |
| Hiệu năng thực tế | baseline | ~40% nhanh hơn/MHz |
Quan trọng: mỗi core LX7 có cache riêng. Trên ESP32 gốc, 2 core chia sẻ cache — khi Core 0 cần cache, Core 1 phải chờ. Trên ESP32-S3, 2 core hoạt động độc lập hơn, ít tranh chấp bus hơn.
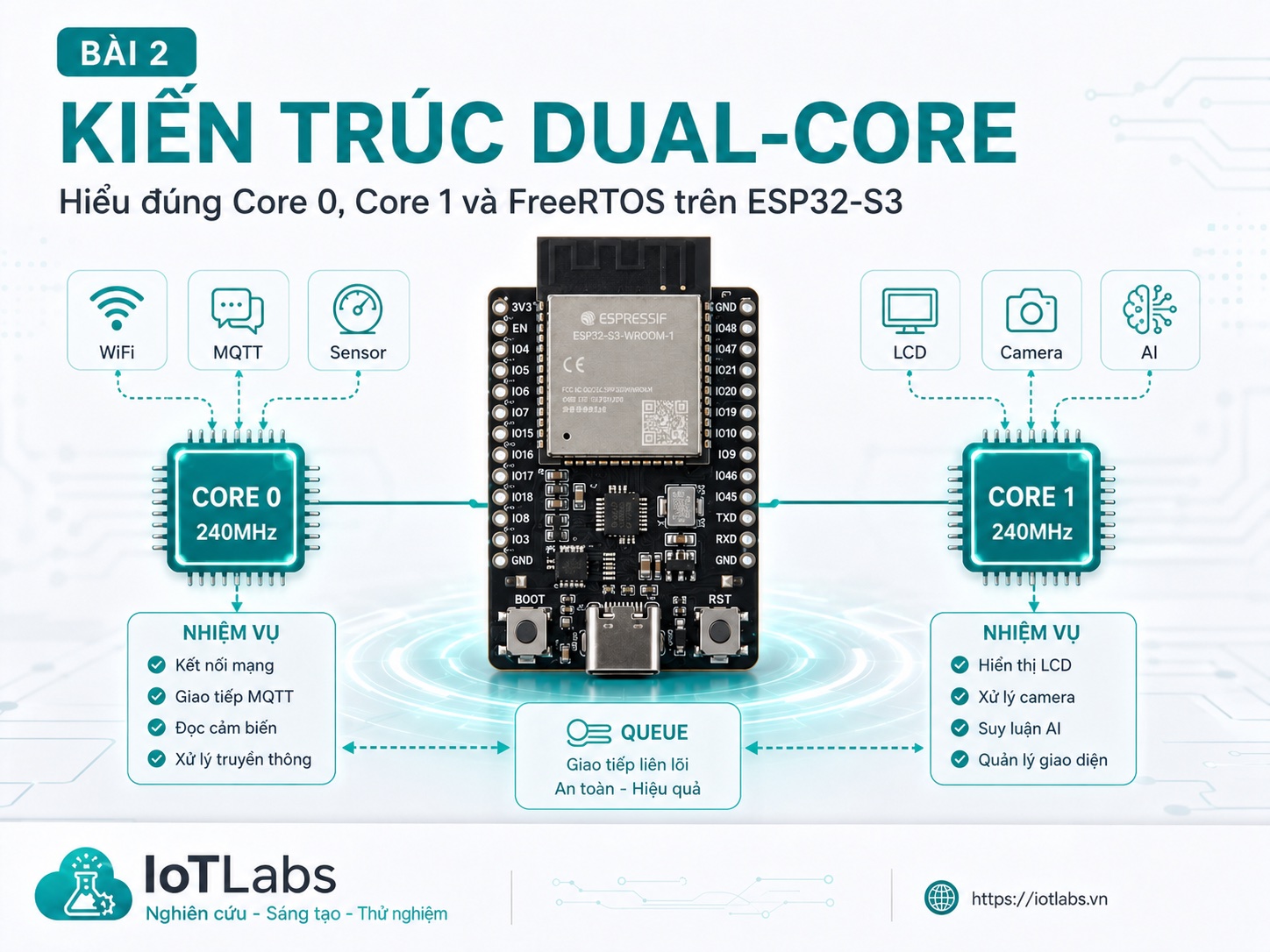
Core 0 và Core 1: Vai Trò Mặc Định
Trong ESP-IDF và Arduino framework, 2 core có phân công mặc định:
Core 0 — PRO_CPU (Protocol CPU)
- Chạy WiFi stack (Espressif WiFi firmware)
- Chạy Bluetooth controller
- Xử lý timer ISR nền
setup()không chạy ở đây (trái với tên gọi)
Core 1 — APP_CPU (Application CPU)
- Chạy
setup()vàloop()của bạn - Mọi task bạn tạo mà không chỉ định core sẽ vào đây
- Scheduler FreeRTOS chạy trên cả 2 core, nhưng APP_CPU là nơi application code sống
void setup() {
Serial.begin(115200);
// Kiểm tra bạn đang ở core nào
Serial.printf("setup() chạy trên Core %d\n", xPortGetCoreID());
// Output: "setup() chạy trên Core 1"
}Nhầm Lẫn Phổ Biến
Nhiều người đọc documentation cũ thấy “Core 0 là PRO_CPU” và nghĩ Core 0 dành riêng cho protocol, không động vào được. Sai. Bạn hoàn toàn có thể tạo task và ghim vào Core 0 — chỉ cần tránh xung đột với WiFi stack.
pinToCore(): Gán Task Vào Core Cụ Thể
FreeRTOS trên ESP32-S3 cho phép gán task vào core cụ thể bằng xTaskCreatePinnedToCore():
// Task chạy trên Core 0 (cùng core với WiFi)
xTaskCreatePinnedToCore(
networkTask, // Hàm task
"NetworkTask", // Tên (để debug)
4096, // Stack size (bytes)
NULL, // Tham số truyền vào
2, // Priority (cao hơn = ưu tiên hơn)
&networkTaskHandle, // Handle để quản lý sau
0 // Core: 0 hoặc 1
);
// Task chạy trên Core 1 (cùng core với loop())
xTaskCreatePinnedToCore(
displayTask,
"DisplayTask",
8192, // LCD cần stack lớn hơn
NULL,
1,
&displayTaskHandle,
1 // Core: 1
);Nếu dùng xTaskCreate() thông thường (không có PinnedToCore), FreeRTOS tự chọn core — thường là Core 1, nhưng không đảm bảo.
Cache: Tại Sao Quan Trọng Với Firmware
Mỗi core có:
- Instruction cache 32 KB: lưu code đã fetch từ Flash
- Data cache 8 KB: lưu data đã đọc từ Flash (read-only, như const strings)
Flash của ESP32-S3 kết nối qua SPI bus (100 MHz–120 MHz). Đọc trực tiếp từ Flash tốn ~100 ns mỗi lần cache miss, trong khi SRAM chỉ tốn ~5 ns.
Điều này có ý nghĩa gì?
// Hàm này chạy nhanh vì nằm gọn trong cache 32 KB
void fastSensorPoll() {
// Vài chục dòng code đơn giản
float temp = readTemperature();
float hum = readHumidity();
xQueueSend(sensorQueue, &temp, 0);
}
// Hàm này có thể bị cache miss nếu code lớn
void hugeDisplayRenderer() {
// Hàng trăm dòng code, nhiều branch phức tạp
// → Instruction cache miss → chậm hơn dự kiến
}Thực hành tốt: Chia code thành các hàm nhỏ, mỗi hàm làm 1 việc. Không chỉ tốt cho đọc code — còn giúp cache hiệu quả hơn.
IRAM: Code Nhanh Không Cần Cache
Một số code cần chạy cực nhanh và không thể chấp nhận cache miss — đặc biệt là ISR (Interrupt Service Routine):
// Đặt ISR vào IRAM để chạy trực tiếp từ SRAM, không qua cache
void IRAM_ATTR gpioISR() {
// ISR phải cực ngắn — chỉ set flag, không làm gì phức tạp
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
xSemaphoreGiveFromISR(buttonSemaphore, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
void setup() {
buttonSemaphore = xSemaphoreCreateBinary();
attachInterrupt(digitalPinToInterrupt(BUTTON_PIN), gpioISR, FALLING);
}IRAM_ATTR yêu cầu linker đặt hàm vào IRAM (Internal RAM) thay vì Flash. Khi CPU thực thi hàm này, không có flash access, không có cache miss — chạy ở tốc độ tối đa.
Đừng lạm dụng IRAM_ATTR — IRAM chỉ có khoảng 400 KB, chủ yếu dùng cho WiFi stack và FreeRTOS. Chỉ dùng cho ISR và các hàm cực kỳ time-critical.
Ví Dụ Thực Tế: 2 Core Làm 2 Việc Song Song
#include <Arduino.h>
QueueHandle_t dataQueue;
// Task trên Core 0: thu thập sensor mỗi 100ms
void sensorTask(void* parameter) {
float sensorData;
while (true) {
sensorData = analogRead(A0) * 3.3f / 4095.0f;
// Gửi dữ liệu qua Queue (thread-safe)
xQueueSend(dataQueue, &sensorData, pdMS_TO_TICKS(10));
vTaskDelay(pdMS_TO_TICKS(100)); // Nhường CPU, không blocking
}
}
// Task trên Core 1: hiển thị lên Serial mỗi 500ms
void displayTask(void* parameter) {
float receivedData;
while (true) {
// Chờ nhận dữ liệu từ Queue (block tối đa 1 giây)
if (xQueueReceive(dataQueue, &receivedData, pdMS_TO_TICKS(1000))) {
Serial.printf("Voltage: %.2f V (Core %d)\n",
receivedData, xPortGetCoreID());
}
}
}
void setup() {
Serial.begin(115200);
dataQueue = xQueueCreate(10, sizeof(float)); // Queue chứa tối đa 10 float
// Ghim task vào core cụ thể
xTaskCreatePinnedToCore(sensorTask, "Sensor", 2048, NULL, 2, NULL, 0);
xTaskCreatePinnedToCore(displayTask, "Display", 4096, NULL, 1, NULL, 1);
}
void loop() {
// loop() trống — mọi logic đã vào task
vTaskDelay(portMAX_DELAY);
}Chạy code này, bạn sẽ thấy 2 task thực sự chạy song song — sensorTask trên Core 0, displayTask trên Core 1.
Khi Nào Không Cần Dual-Core
Dual-Core không phải lúc nào cũng tốt hơn:
| Tình huống | Có nên dùng Dual-Core? |
|---|---|
| Sensor đơn giản + MQTT | Không — single task đủ |
| LCD + MQTT cùng lúc | Có — tách ra 2 core |
| OTA + sensor polling | Có — OTA blocking cần core riêng |
| Xử lý audio real-time | Có — latency yêu cầu core riêng |
| Blink LED | Không — overkill |
Quy tắc đơn giản: nếu bạn có 2 việc không liên quan và cần chạy đồng thời không ngắt quãng nhau → tách ra 2 core. Nếu không, một core với FreeRTOS task switching là đủ.
Tổng Kết
| Khái niệm | Điểm chính |
|---|---|
| Core 0 (PRO_CPU) | WiFi stack chạy ở đây — có thể thêm task nhưng cẩn thận |
| Core 1 (APP_CPU) | setup() và loop() chạy ở đây — nơi application của bạn |
| Instruction cache 32 KB/core | Mỗi core có cache riêng — ít tranh chấp hơn ESP32 gốc |
pinToCore() | Gán task vào core cụ thể bằng xTaskCreatePinnedToCore() |
IRAM_ATTR | Đặt ISR và code time-critical vào SRAM — không qua cache |
| Queue | Giao tiếp giữa task an toàn, không biến global |
Bài tiếp theo: Bài 3 — FreeRTOS Trên ESP32-S3: Từ loop() Đến Hệ Điều Hành Thời Gian Thực — Task, Queue, Semaphore, Mutex và cách tổ chức firmware nhiều luồng không bị race condition.
📚 Series: Sức Mạnh ESP32-S3 Dual-Core
⬅️ Bài trước: S3 Dual-Core – Bài 1: ESP32-S3 Là Gì? Nền Tảng AIoT Firmware Hiện Đại
➡️ Bài tiếp theo: S3 Dual-Core – Bài 3: FreeRTOS Từ loop() Đến Hệ Điều Hành Thời Gian Thực