
Hall effect sensor phát hiện từ trường không cần tiếp xúc vật lý — khác hoàn toàn với reed switch. Nguyên lý dựa trên lực Lorentz tác dụng lên điện tử chuyển động, tạo ra điện áp nhỏ có thể đo được. KY-003 tích hợp toàn bộ xử lý tín hiệu trong 1 IC nhỏ, cho ra tín hiệu số sạch.
Nguyên Lý Hoạt Động
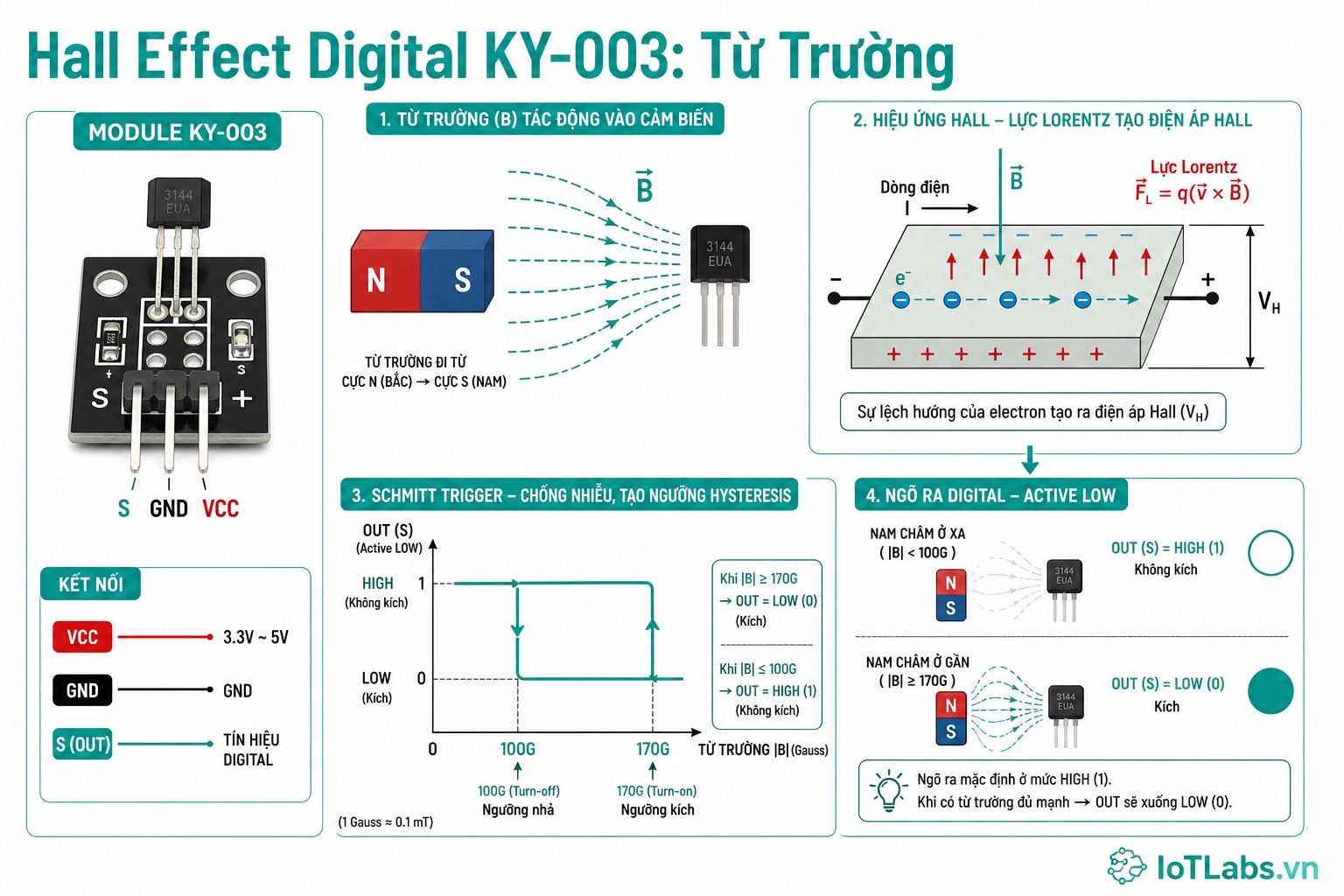
1. Hiệu Ứng Hall — Vật Lý Cơ Bản
Phát hiện bởi Edwin Hall năm 1879:
Thanh dẫn mang dòng điện I trong từ trường B:
B (từ trường — vào màn hình ⊗)
↓
┌────────────────────────┐
│ │
I → │ ●→ electron →● │ → I
│ ↑ │ │
│ Lực Lorentz (F) ↓ │
│ = q(v × B) │
│ │
└────────────────────────┘
Electron lệch lên trên
→ Tích lũy điện tích ở đỉnh và đáy
→ Tạo điện áp Hall VH = IB/(ned)
VH: rất nhỏ (~mV) với Si thông thường
→ IC khuếch đại và so sánh với ngưỡngÝ nghĩa từng đại lượng:
I= dòng điện qua tấm Hall (mA — do nguồn nuôi IC)B= cảm ứng từ (Tesla/Gauss) — do nam châm bên ngoàin= mật độ hạt tải điện (cm⁻³)e= điện tích electrond= độ dày tấm Hall
2. IC Hall Unipolar với Schmitt Trigger
KY-003 dùng IC Hall effect số loại unipolar (ví dụ SS49E, A3141, hoặc tương tự):
Sơ đồ khối IC Hall effect unipolar:
Tấm Hall → [Khuếch đại] → [Mạch so sánh ngưỡng] → [Schmitt Trigger] → Output
↑
Ngưỡng cài sẵn
(khoảng 170-200 Gauss)Unipolar: Chỉ phản hồi với một cực của nam châm (thường Nam cực — South pole). Đưa Bắc cực lại gần không có tác dụng (hoặc ngược lại tùy chiều thiết kế).
Schmitt trigger: Tạo độ trễ (hysteresis) để tránh dao động ở ngưỡng:
- Ngưỡng bật (B_ON): ~170 Gauss → output = LOW
- Ngưỡng tắt (B_OFF): ~100 Gauss → output = HIGH
- Hysteresis: ~70 Gauss — tránh output flicker khi từ trường dao động quanh ngưỡng
3. KY-003 vs Reed Switch — Ưu Nhược Điểm
| KY-003 Hall Digital | Reed Switch | |
|---|---|---|
| Nguyên lý | Bán dẫn (Hall IC) | Cơ học (lá từ) |
| Tiếp xúc vật lý | Không | Không (nhưng cơ học bên trong) |
| Bounce | Không (Schmitt trigger) | Có (lá kim loại nảy) |
| Tuổi thọ | Vô hạn (solid state) | ~10⁸ thao tác |
| Khoảng cách | 2-15mm (tùy IC và nam châm) | Tương tự |
| Phân cực nam châm | Quan trọng (unipolar) | Không quan trọng |
| Giá | Cao hơn | Thấp hơn |
4. Phân Biệt KY-003 (Số) vs KY-024 (Analog)
| KY-003 | KY-024 | |
|---|---|---|
| Output | Digital: HIGH hoặc LOW | Analog: 0-VCC (tuyến tính) |
| IC | Hall switch (unipolar) | Hall sensor tuyến tính (49E) |
| Đo cường độ từ trường | Không | Có |
| Ứng dụng | Có/không nam châm, RPM | Đo khoảng cách, cường độ |
Thông Số Kỹ Thuật
| Thông số | Giá trị |
|---|---|
| Điện áp hoạt động | 3.3V – 5V |
| Dòng tiêu thụ | ~5mA |
| Ngưỡng phát hiện | ~100-200 Gauss (South pole) |
| Output | Active LOW (open-collector + pull-up trên module) |
| Bounce | Không (Schmitt trigger) |
| Thời gian phản hồi | < 1ms |
Sơ Đồ Chân (Pinout)
KY-003 — Nhìn từ mặt trước:
┌─────────────────────────────────┐
│ [Hall IC] [LED chỉ thị] │
└─────────────────────────────────┘
GND VCC S
(-) (3.3-5V) (Signal OUT)| Chân | Ký hiệu | Mô tả |
|---|---|---|
| GND | – | Mass |
| VCC | + | Nguồn 3.3V-5V |
| S | Signal | Output — LOW khi có từ trường đủ mạnh |
Mặt cảm biến: Nhìn nhãn trên IC, đưa mặt có chữ của IC về phía nam châm (hoặc thử cả 2 mặt). Với unipolar: chỉ một mặt phản hồi.
Kết Nối Phần Cứng
KY-003 với ESP32 DevKit V1
ESP32 DevKit V1 KY-003 Module
───────────────────── ─────────────────
3V3 ─────────────────→ VCC
GND ─────────────────→ GND
GPIO18 (Input) ────────→ SGPIO18: interrupt-capable, output-capable, an toàn cho 3.3V logic.
KY-003 với Arduino Uno
Arduino Uno KY-003 Module
───────────────────── ─────────────────
5V ─────────────────→ VCC
GND ─────────────────→ GND
Pin 2 (INT0) ─────────→ SCode Arduino IDE
Code Phát Hiện Nam Châm Cơ Bản — Arduino Uno
/*
* Hall Effect KY-003 — Phát hiện nam châm
* Board: Arduino Uno
* Kết nối: VCC→5V, GND→GND, S→Pin2
*
* Output active LOW: S = LOW khi có từ trường đủ mạnh
*
* Lưu ý: thử cả 2 mặt của nam châm (unipolar chỉ nhạy 1 cực)
* Đưa từng mặt lại gần mặt có IC, xem đèn LED module có sáng không
*/
const int HALL_PIN = 2;
const int LED_PIN = 13;
void setup() {
Serial.begin(9600);
pinMode(HALL_PIN, INPUT); // Module đã có pull-up
pinMode(LED_PIN, OUTPUT);
Serial.println("=== Hall Effect KY-003 ===");
Serial.println("Đưa nam châm lại gần mặt IC (thử cả 2 mặt)");
}
int lastState = -1;
void loop() {
int hallVal = digitalRead(HALL_PIN);
if (hallVal != lastState) {
lastState = hallVal;
if (hallVal == LOW) {
Serial.println("NAM CHÂM PHÁT HIỆN! (từ trường đủ mạnh)");
digitalWrite(LED_PIN, HIGH);
} else {
Serial.println("Không có từ trường");
digitalWrite(LED_PIN, LOW);
}
}
delay(10);
}Code Đo RPM Bằng Hall Effect — Arduino Uno
/*
* Hall Effect KY-003 — Đo RPM động cơ/quạt
* Gắn nam châm nhỏ vào trục quay, KY-003 cố định
* Mỗi vòng = 1 xung LOW
* Board: Arduino Uno
* Kết nối: VCC→5V, GND→GND, S→Pin2 (INT0)
*
* Lợi thế vs reed switch: không bounce → đo RPM chính xác hơn
*/
const int HALL_PIN = 2;
const int MAGNETS = 1; // Số nam châm trên trục (tăng để tăng độ phân giải)
volatile unsigned long pulseCount = 0;
unsigned long lastReportTime = 0;
const unsigned long REPORT_INTERVAL = 1000; // Báo cáo mỗi 1 giây
void onMagnet() {
pulseCount++;
}
void setup() {
Serial.begin(9600);
pinMode(HALL_PIN, INPUT);
// FALLING: khi nam châm đến gần (LOW pulse)
attachInterrupt(digitalPinToInterrupt(HALL_PIN), onMagnet, FALLING);
Serial.println("=== RPM Meter (Hall Effect) ===");
lastReportTime = millis();
}
void loop() {
if (millis() - lastReportTime >= REPORT_INTERVAL) {
// Đọc và reset (atomic)
noInterrupts();
unsigned long count = pulseCount;
pulseCount = 0;
interrupts();
lastReportTime = millis();
// count = số xung trong 1 giây = số vòng/giây (nếu 1 nam châm)
float rpm = (float)count / MAGNETS * 60.0;
Serial.print("Xung/s: "); Serial.print(count);
Serial.print(" → RPM: "); Serial.println(rpm, 1);
}
}Code Cảm Biến Vị Trí Không Tiếp Xúc — Arduino Uno
/*
* Hall Effect — Phát hiện vị trí mà không cần cơ học tiếp xúc
* Ứng dụng: giới hạn hành trình motor, kiểm tra vị trí đóng/mở
* Board: Arduino Uno
* Kết nối: VCC→5V, GND→GND, S→Pin2 (INT0)
*/
const int HALL_PIN = 2;
const int MOTOR_STOP_PIN = 7; // Relay hoặc logic dừng motor
volatile bool magnetDetected = false;
// ISR — gọi khi nam châm đến ngưỡng (FALLING)
void onHallTrigger() {
magnetDetected = true;
}
// ISR — gọi khi nam châm rời đi (RISING)
void onHallRelease() {
magnetDetected = false;
}
void setup() {
Serial.begin(9600);
pinMode(HALL_PIN, INPUT);
pinMode(MOTOR_STOP_PIN, OUTPUT);
digitalWrite(MOTOR_STOP_PIN, LOW);
// Cần 2 interrupt cho FALLING và RISING — Arduino Uno chỉ có 1 ISR per pin
// Dùng CHANGE và đọc state trong ISR
attachInterrupt(digitalPinToInterrupt(HALL_PIN), []() {
magnetDetected = (digitalRead(HALL_PIN) == LOW);
}, CHANGE);
Serial.println("Giới hạn hành trình Hall Effect sẵn sàng");
}
bool lastDetected = false;
void loop() {
if (magnetDetected != lastDetected) {
lastDetected = magnetDetected;
if (magnetDetected) {
Serial.println("ĐẾN VỊ TRÍ GIỚI HẠN — Dừng motor!");
digitalWrite(MOTOR_STOP_PIN, HIGH); // Dừng motor
} else {
Serial.println("Rời khỏi vị trí giới hạn");
digitalWrite(MOTOR_STOP_PIN, LOW); // Cho motor chạy
}
}
}Code ESP32 — Hall Sensor + MQTT Alert
/*
* Hall Effect KY-003 — ESP32, phát hiện nam châm + log
* Board: ESP32 DevKit V1
* Kết nối: VCC→3V3, GND→GND, S→GPIO18
*
* Có thể thêm MQTT hoặc HTTP notification ở phần "send alert"
*/
const int HALL_PIN = 18;
volatile bool hallEvent = false;
volatile bool currentState = false;
unsigned long detectionCount = 0;
void IRAM_ATTR onHallISR() {
currentState = (digitalRead(HALL_PIN) == LOW); // LOW = phát hiện
hallEvent = true;
}
void setup() {
Serial.begin(115200);
pinMode(HALL_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(HALL_PIN), onHallISR, CHANGE);
// Đọc trạng thái khởi đầu
currentState = (digitalRead(HALL_PIN) == LOW);
Serial.println("=== Hall Effect Sensor ESP32 ===");
Serial.println(currentState ? "Nam châm hiện tại: ĐÃ PHÁT HIỆN" : "Trạng thái: Không có nam châm");
}
unsigned long lastEventTime = 0;
void loop() {
if (hallEvent) {
hallEvent = false;
unsigned long now = millis();
if (now - lastEventTime > 20) { // Debounce mềm 20ms
lastEventTime = now;
if (currentState) {
detectionCount++;
Serial.printf("[%lu ms] NAM CHÂM #%lu — Phát hiện!\n", now, detectionCount);
// Gọi sendAlert() / MQTT publish tại đây
} else {
Serial.printf("[%lu ms] Nam châm rời đi\n", now);
}
}
}
}Kết Quả Mong Đợi
=== Hall Effect KY-003 ===
Đưa nam châm lại gần mặt IC (thử cả 2 mặt)
NAM CHÂM PHÁT HIỆN! (từ trường đủ mạnh)
Không có từ trường
NAM CHÂM PHÁT HIỆN! (từ trường đủ mạnh)Ứng Dụng Thực Tế
| Ứng dụng | Chi tiết |
|---|---|
| Tốc kế không tiếp xúc | Gắn nam châm lên bánh xe, đo RPM |
| Giới hạn hành trình | Dừng motor khi đến vị trí cuối |
| Phát hiện nam châm từ xa | Không cần tiếp xúc qua vỏ nhựa mỏng |
| Mã hóa vị trí quay | Nhiều nam châm → nhiều vị trí |
| Khóa thông minh | Nam châm trong thẻ từ → mở khóa |
Lưu Ý Khi Sử Dụng
1. Thử cả 2 mặt của nam châm — unipolar
IC unipolar chỉ nhạy với một cực. Nếu đưa sai cực vào không thấy phản hồi: lật ngược nam châm. LED trên module sẽ sáng khi phát hiện đúng.
2. Khoảng cách kích hoạt thay đổi theo nam châm
Nam châm neodymium nhỏ (5mm): kích hoạt ở ~5mm. Ferrite lớn: ~15-20mm. Dùng khoảng cách nhất quán trong ứng dụng, không thay đổi loại nam châm sau khi đã căn chỉnh.
3. Không bounce nhưng vẫn cần debounce nhỏ
Schmitt trigger loại bỏ bounce điện tử nhưng rung cơ học (nam châm gắn trên trục quay còn dao động) vẫn có thể gây xung lặp. Debounce 5-20ms là đủ.
4. ESP32 có Hall sensor tích hợp — không cần module ngoài
ESP32 có Hall effect sensor nội bộ đọc bằng hallRead(). Nhưng độ nhạy thấp hơn và kết quả phụ thuộc vào chip cụ thể → KY-003 đáng tin cậy hơn.