Author: admin
-
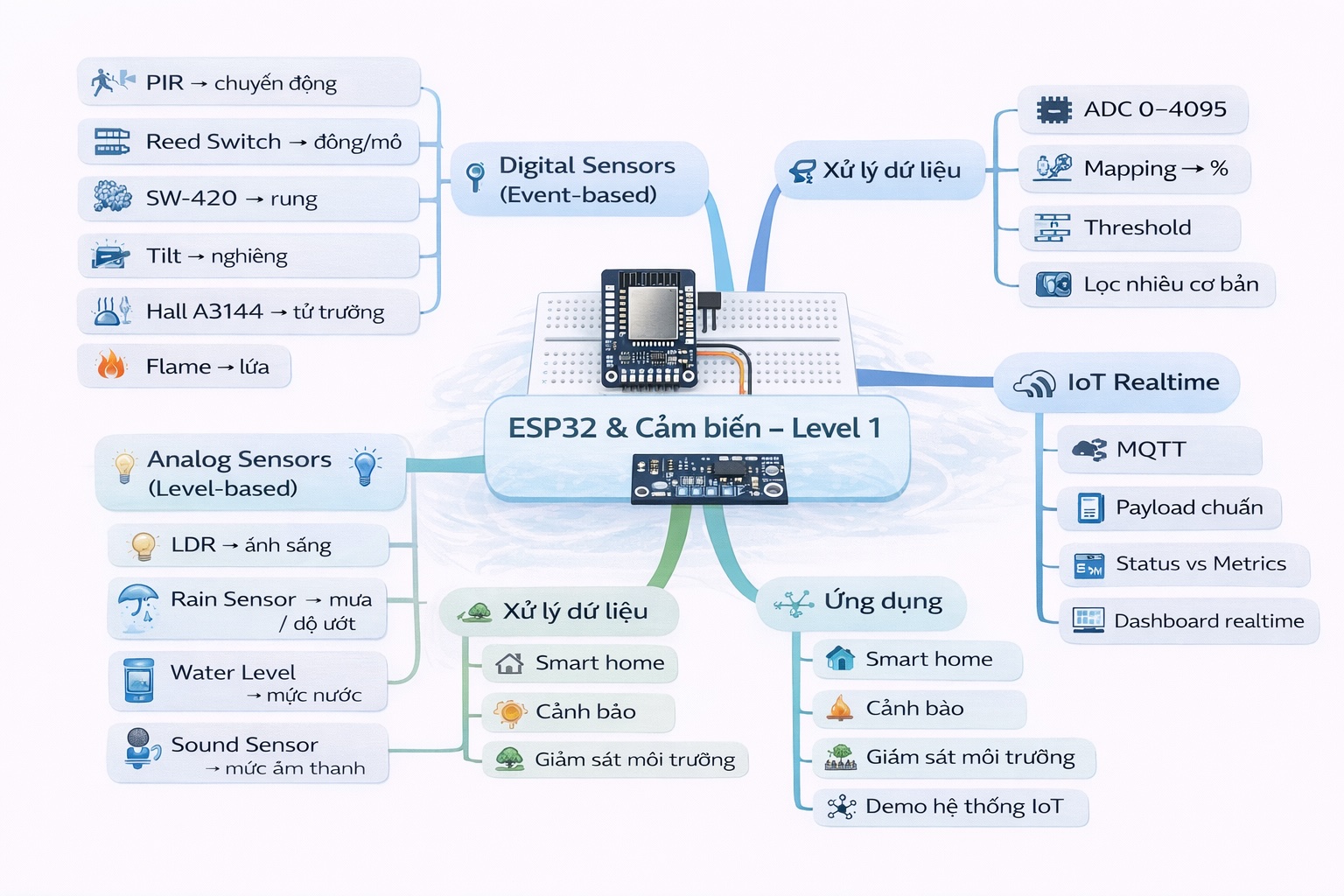
Series ESP32 & Cảm biến: Tổng kết Level 1 – từ linh kiện cơ bản tới IoT realtime
Bài tổng kết Level 1 – ESP32 & Cảm biến giúp bạn hệ thống lại toàn bộ kiến thức đã học sau 10 bài thực hành với các cảm biến DIY phổ biến. Từ cảm biến digital và analog, cách đọc ADC, xử lý ngưỡng, chuẩn hoá dữ liệu đến gửi MQTT theo dõi realtime…
-
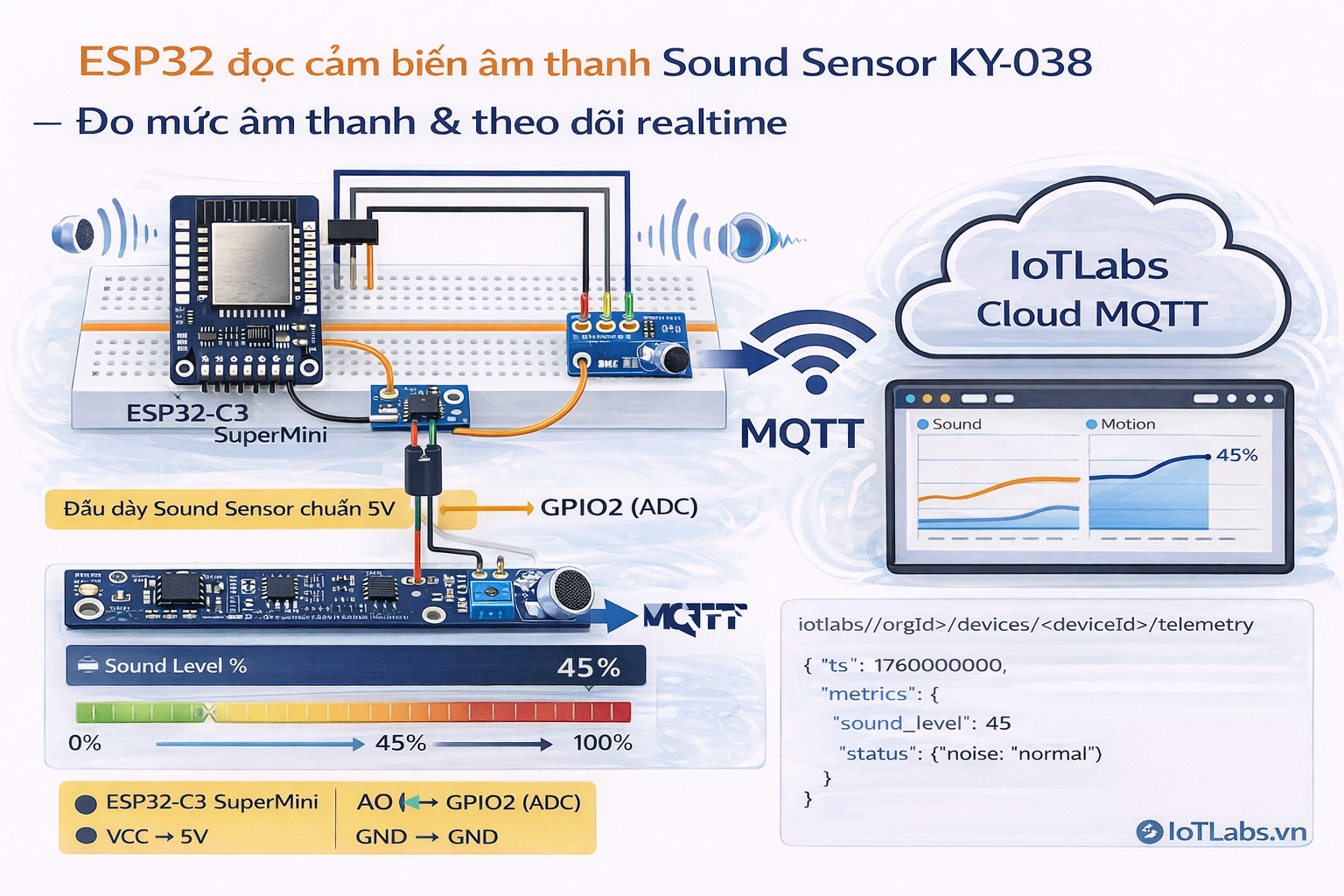
Series ESP32 & Cảm biến: Bài 10 – Đọc cảm biến Sound Sensor (KY-038/KY-037): đo mức âm thanh & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến âm thanh (Sound Sensor KY-038 / KY-037) để đo mức âm thanh môi trường và theo dõi realtime. Bài viết gồm 2 ví dụ code: (1) đọc mức âm thanh local qua ADC, chuẩn hoá giá trị thành % mức ồn, (2) gửi dữ liệu âm thanh lên IoTLabs…
-
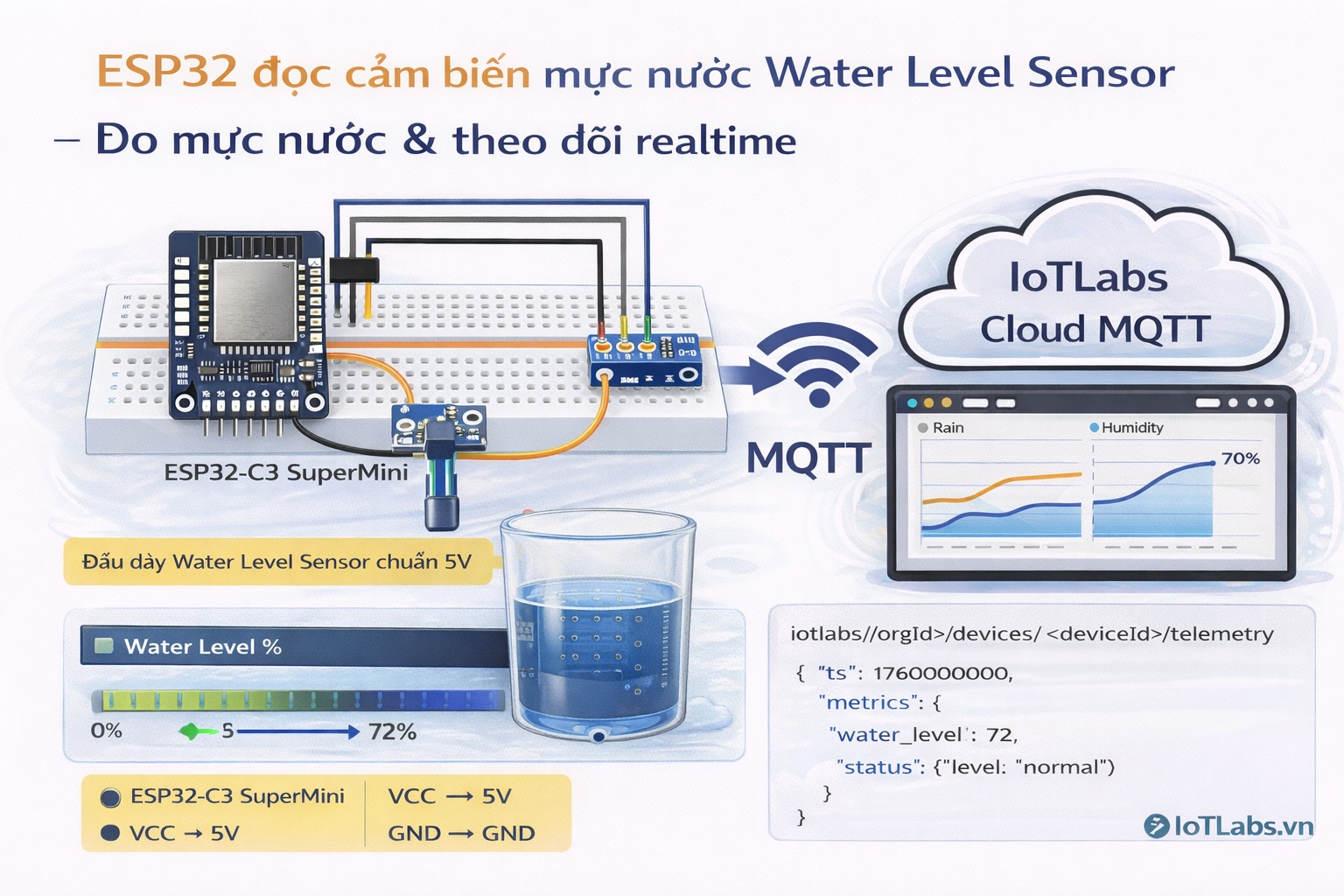
Series ESP32 & Cảm biến: Bài 9 – Đọc cảm biến Water Level Sensor: đo mực nước & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến mực nước (Water Level Sensor) để đo mực nước dạng analog và theo dõi realtime. Bài viết gồm 2 ví dụ code: (1) đọc mực nước local qua ADC, chuẩn hoá giá trị thành % mực nước, (2) gửi dữ liệu mực nước lên IoTLabs Cloud MQTT để giám…
-
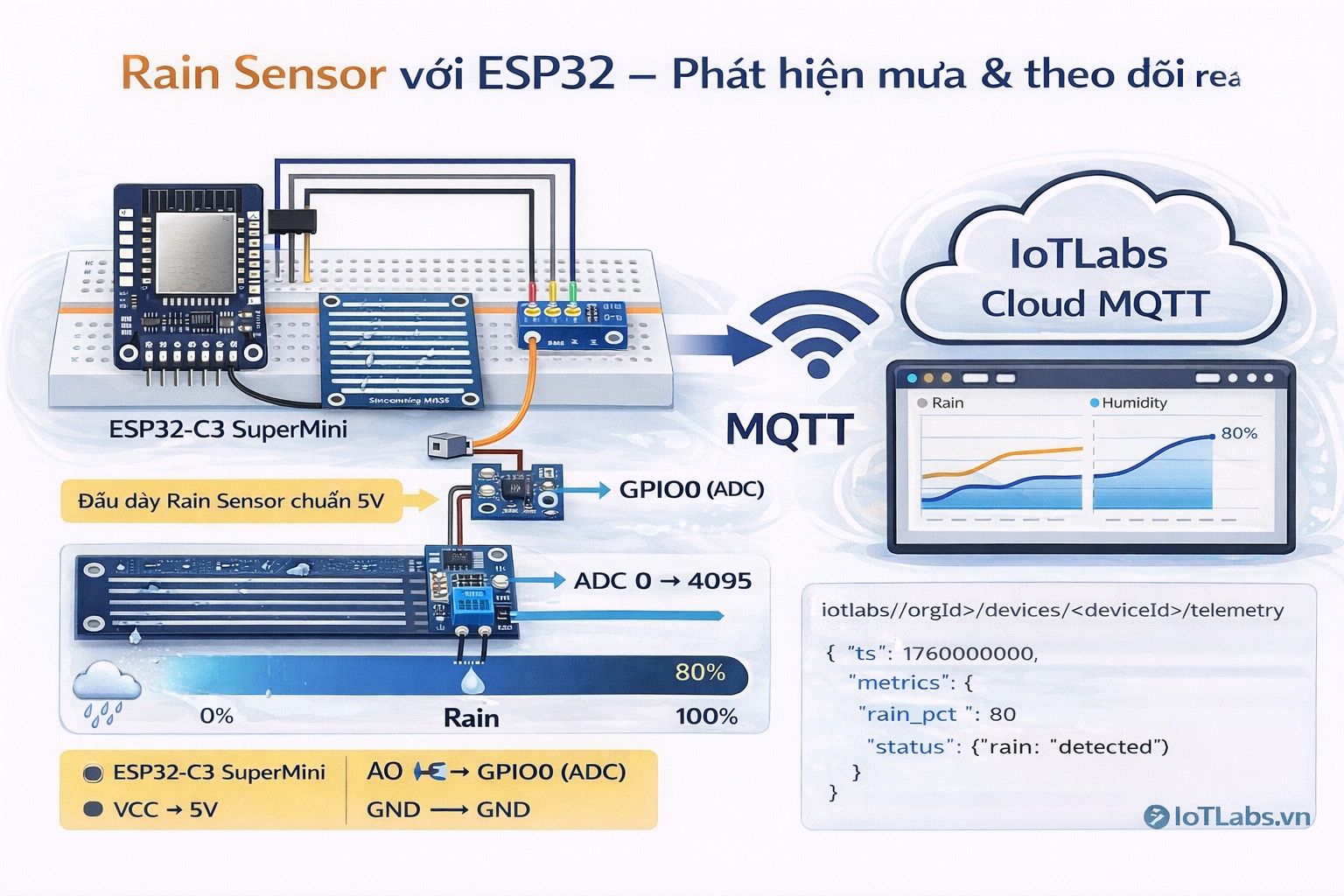
Series ESP32 & Cảm biến: Bài 8 – Đọc cảm biến mưa Rain Sensor: phát hiện mưa & theo dõi realtime
Hướng dẫn đọc cảm biến mưa (Rain Sensor) bằng ESP32-C3 SuperMini để phát hiện mưa và theo dõi realtime. Bài viết gồm 2 ví dụ code: (1) đọc cảm biến mưa local qua ADC, chuẩn hoá mức ướt (%) và xác định trạng thái mưa theo ngưỡng, (2) gửi dữ liệu mưa lên IoTLabs Cloud…
-
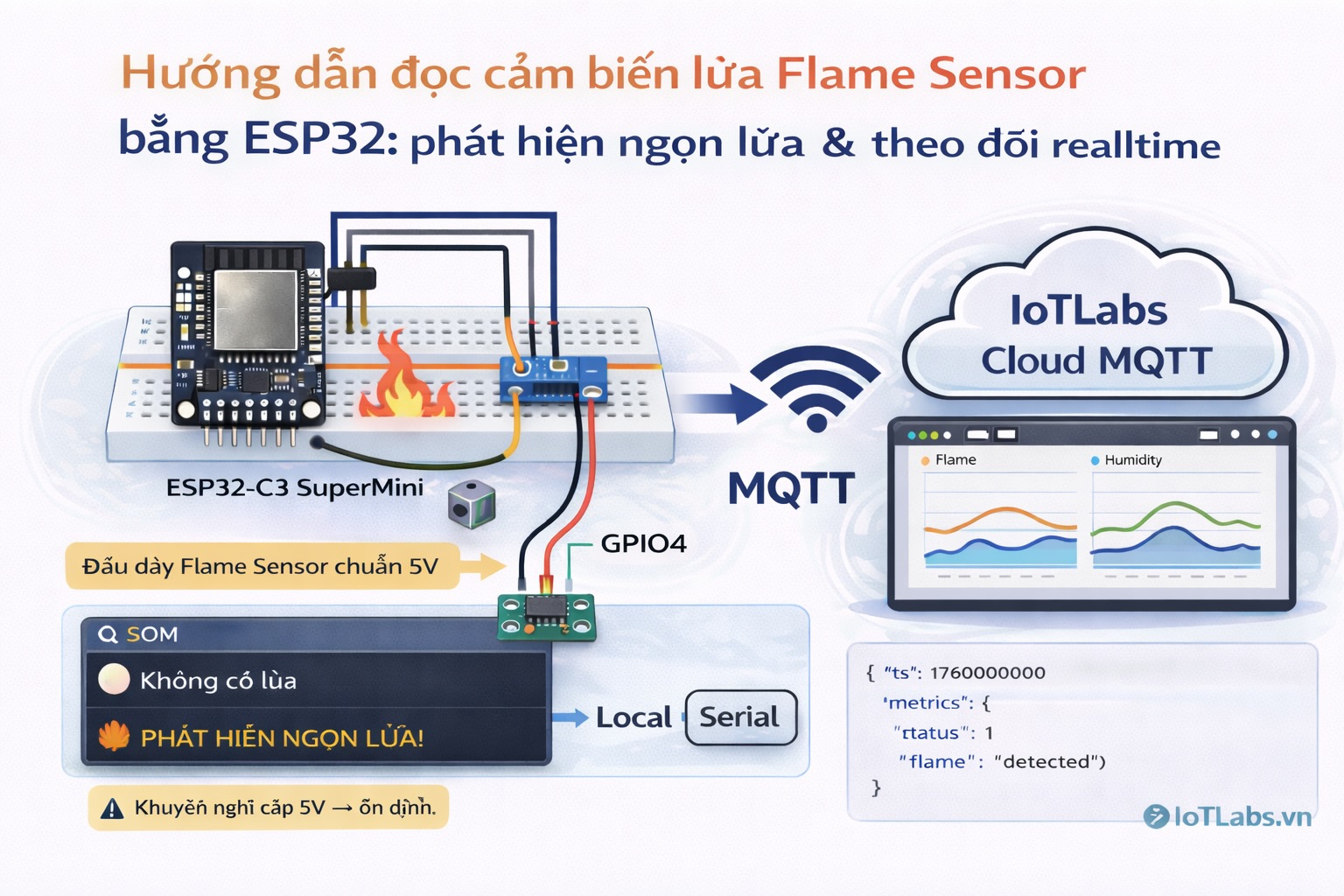
Series ESP32 & Cảm biến: Bài 7 – Đọc cảm biến lửa Flame Sensor: phát hiện ngọn lửa & theo dõi realtime
Hướng dẫn đọc cảm biến lửa (Flame Sensor) bằng ESP32-C3 SuperMini để phát hiện ngọn lửa và theo dõi realtime. Bài viết gồm 2 ví dụ code: (1) đọc cảm biến lửa local qua Serial với tín hiệu digital, (2) gửi trạng thái phát hiện lửa lên IoTLabs Cloud MQTT để giám sát từ xa.…
-
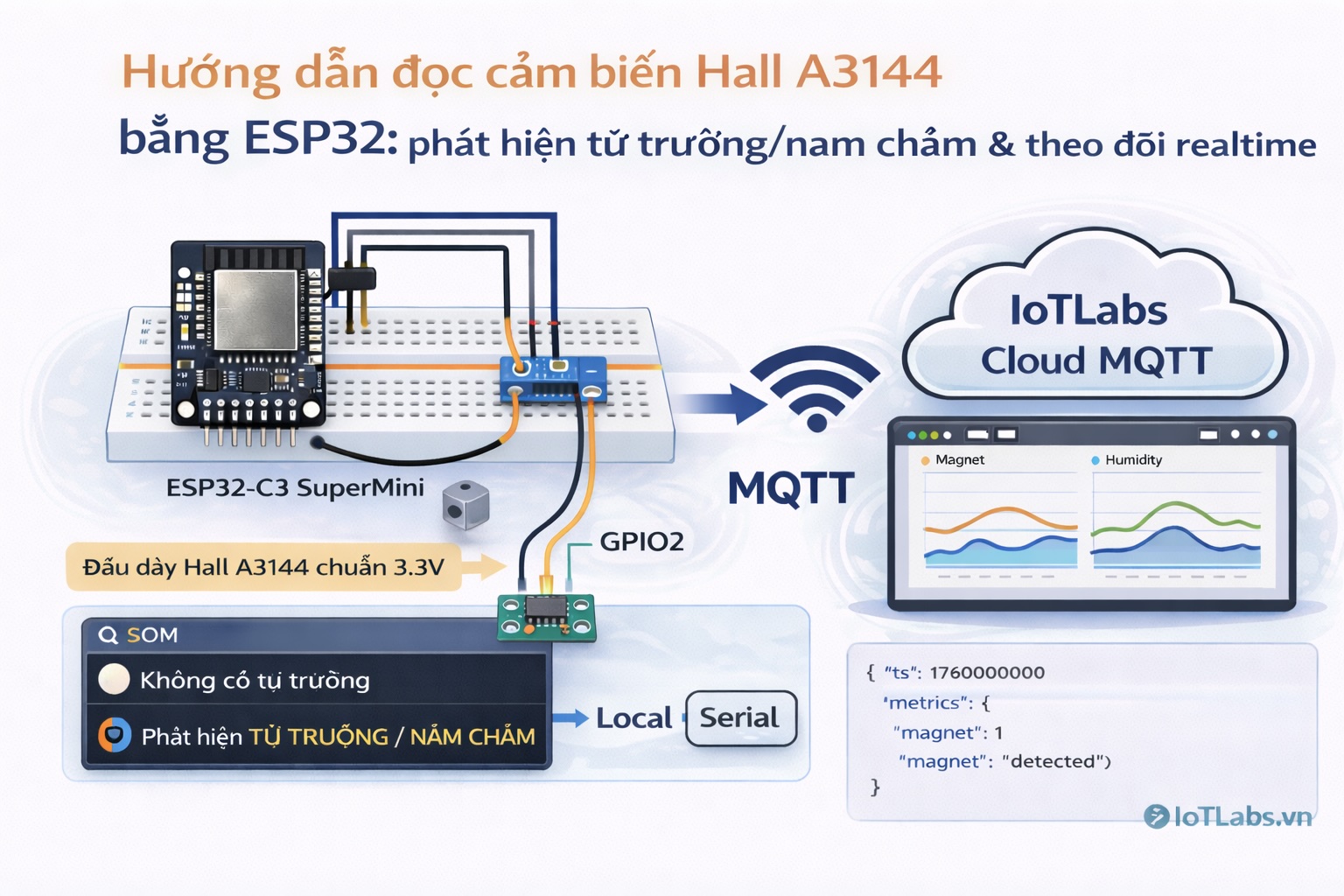
Series ESP32 & Cảm biến: Bài 6 – Đọc cảm biến Hall A3144: phát hiện từ trường & theo dõi realtime
Hướng dẫn đọc cảm biến Hall A3144 bằng ESP32-C3 SuperMini để phát hiện từ trường và nam châm. Bài viết gồm 2 ví dụ code: (1) đọc trạng thái Hall sensor local qua Serial với logic LOW khi có từ trường, (2) gửi trạng thái phát hiện nam châm lên IoTLabs Cloud MQTT để theo…
-
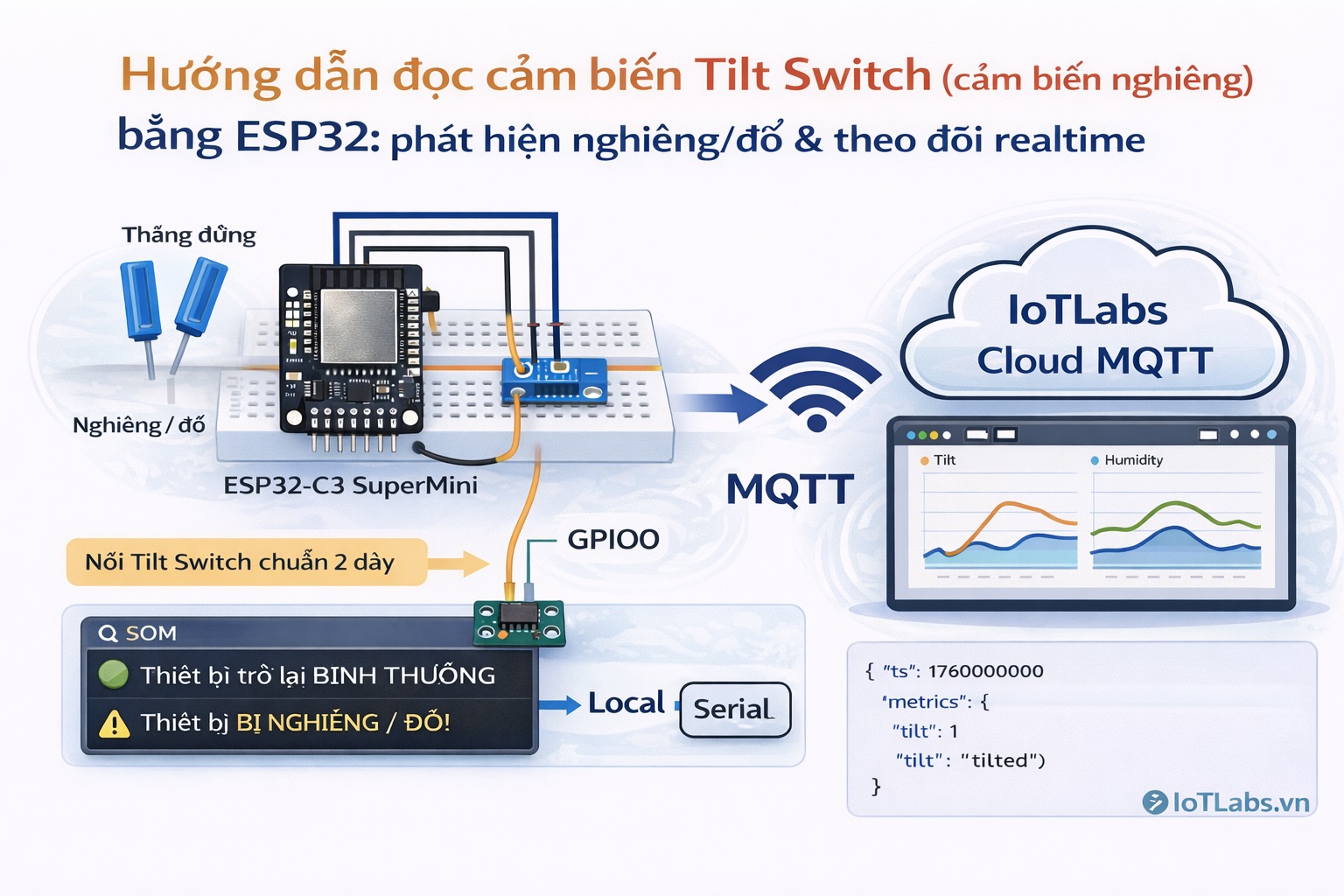
Series ESP32 & Cảm biến: Bài 5 – Đọc cảm biến nghiêng (Tilt Switch): phát hiện nghiêng/đổ & theo dõi realtime
Hướng dẫn đọc cảm biến Tilt Switch (cảm biến nghiêng) bằng ESP32-C3 SuperMini để phát hiện thiết bị bị nghiêng hoặc đổ. Bài viết gồm 2 ví dụ code: (1) đọc trạng thái nghiêng local qua Serial với INPUT_PULLUP, (2) gửi trạng thái nghiêng lên IoTLabs Cloud MQTT để theo dõi realtime. Bạn sẽ hiểu…
-
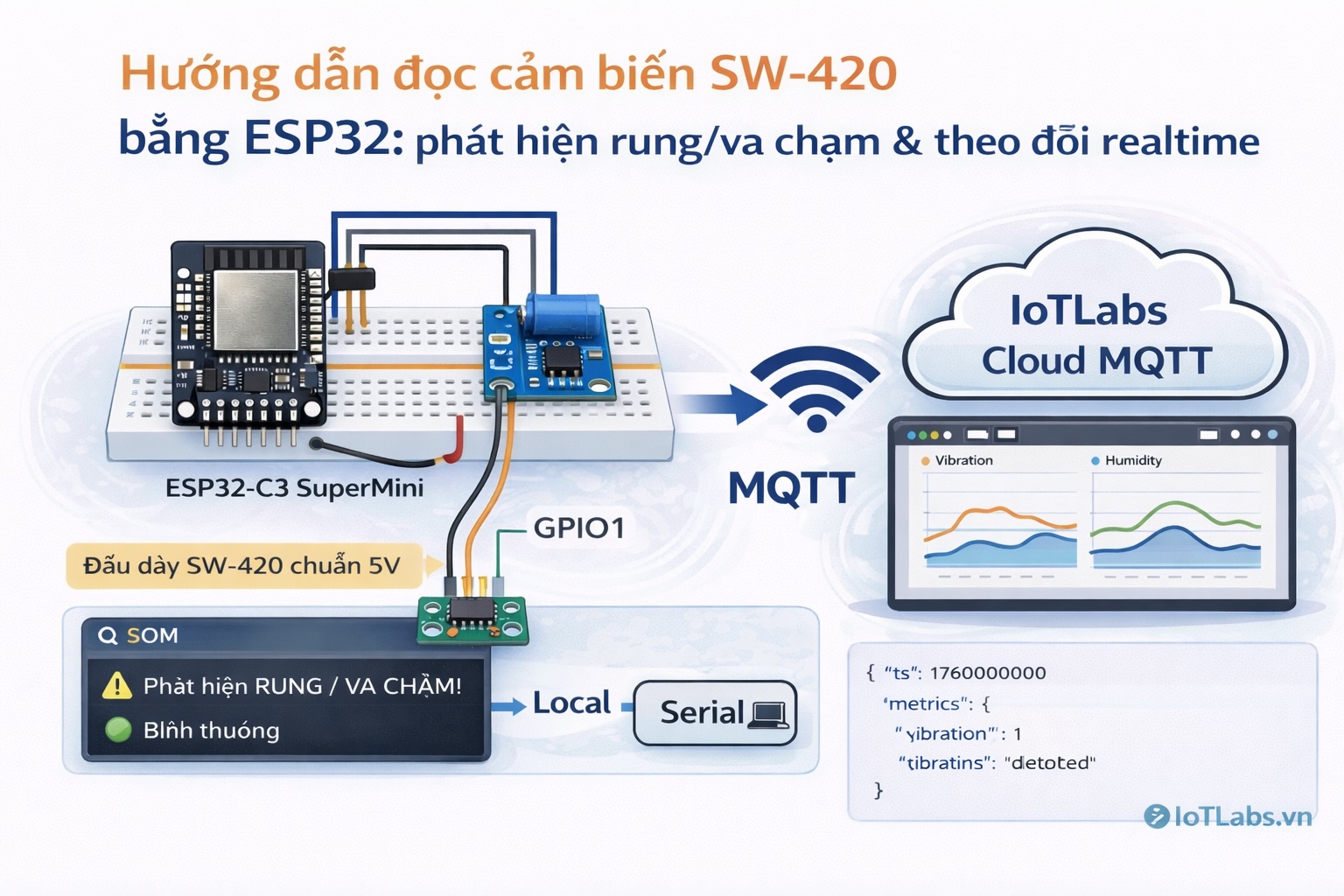
Series ESP32 & Cảm biến: Bài 4 – Đọc cảm biến SW-420 bằng ESP32: phát hiện rung/va chạm & theo dõi realtime
Hướng dẫn đọc cảm biến rung SW-420 bằng ESP32-C3 SuperMini để phát hiện rung và va chạm bất thường. Bài viết gồm 2 ví dụ code: (1) đọc tín hiệu rung local qua Serial bằng cách phát hiện cạnh để tránh spam, (2) gửi sự kiện rung lên IoTLabs Cloud MQTT để theo dõi realtime.…
-
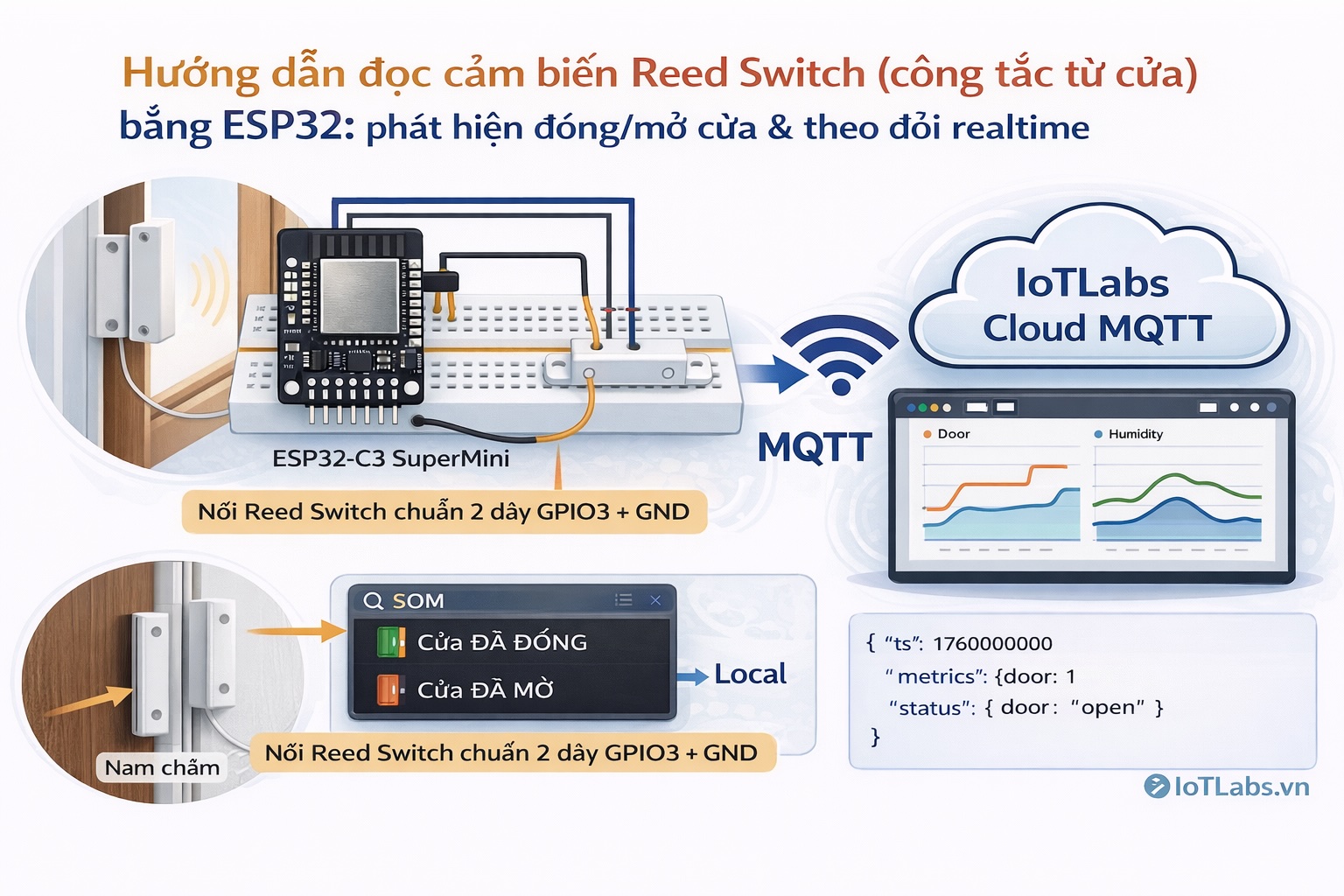
Series ESP32 & Cảm biến: Bài 3 – Hướng dẫn đọc cảm biến Reed Switch (công tắc từ cửa): phát hiện đóng/mở cửa & theo dõi realtime
Hướng dẫn đọc cảm biến Reed Switch (công tắc từ cửa) bằng ESP32-C3 SuperMini để phát hiện trạng thái đóng/mở cửa và theo dõi realtime. Bài viết có 2 ví dụ code: (1) đọc trạng thái cửa local qua Serial với INPUT_PULLUP, (2) gửi trạng thái đóng/mở cửa lên IoTLabs Cloud MQTT để giám sát…
-
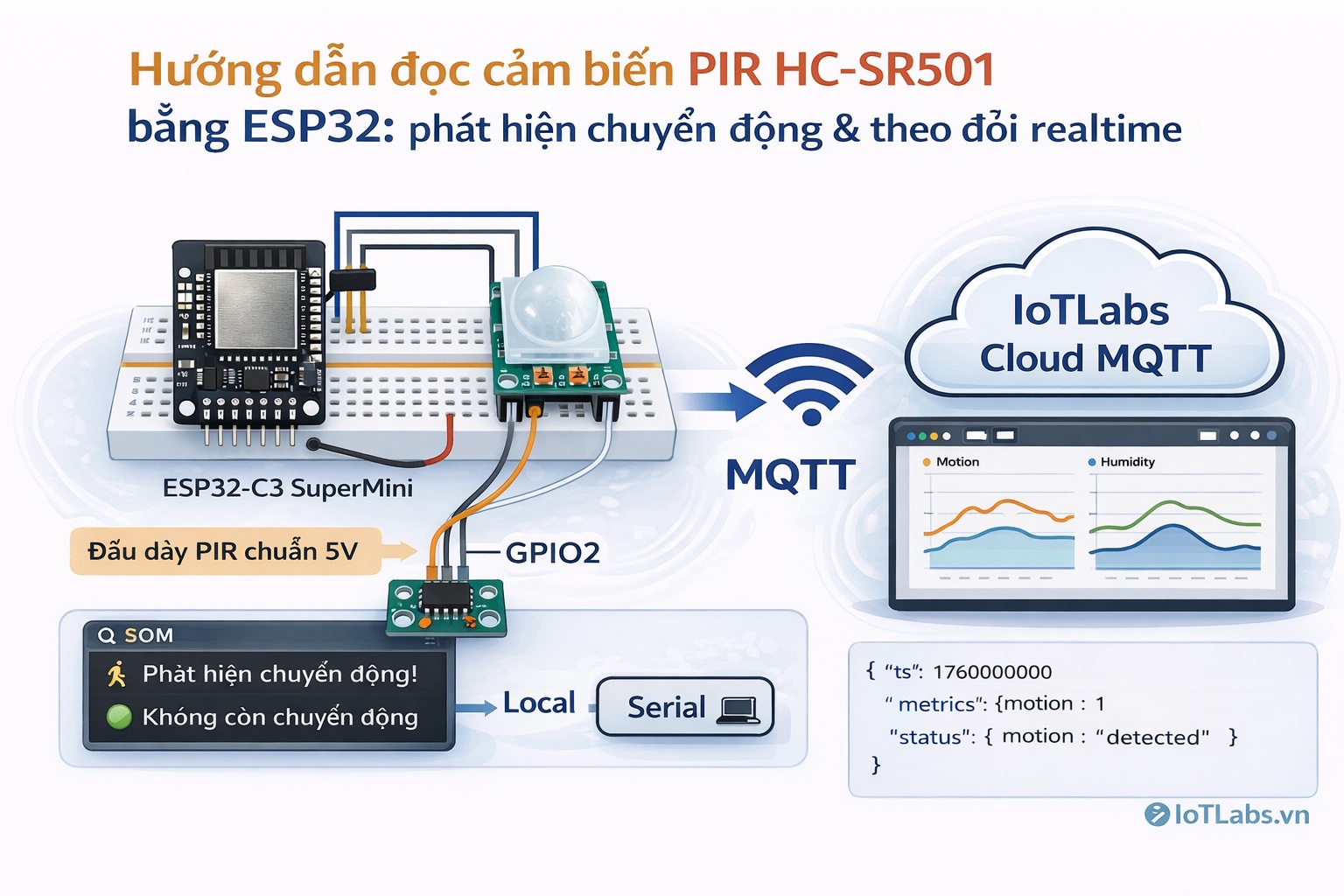
Series ESP32 & Cảm biến: Bài 2 – Đọc cảm biến PIR HC-SR501: phát hiện chuyển động & theo dõi realtime
Hướng dẫn đọc cảm biến PIR HC-SR501 bằng ESP32-C3 SuperMini để phát hiện chuyển động người và theo dõi realtime. Bài viết gồm 2 ví dụ code: (1) đọc PIR local và hiển thị trạng thái qua Serial, (2) gửi trạng thái chuyển động lên IoTLabs Cloud MQTT để giám sát từ xa. Bạn sẽ…