Author: admin
-
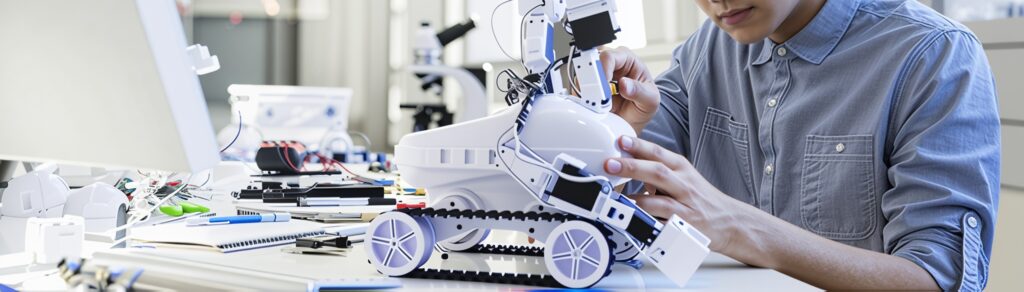
Series ESP32 & Cảm biến: Bài 18 – Đọc cảm biến DS3231 (RTC): giữ thời gian chính xác & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến thời gian thực DS3231 (RTC) để giữ thời gian chính xác, hoạt động độc lập Internet và gửi timestamp realtime lên IoTLabs Cloud MQTT. Bài viết giúp bạn hoàn thiện hệ IoT chạy ổn định, hỗ trợ log offline, store-and-forward và tư duy hệ thống production-ready.
-
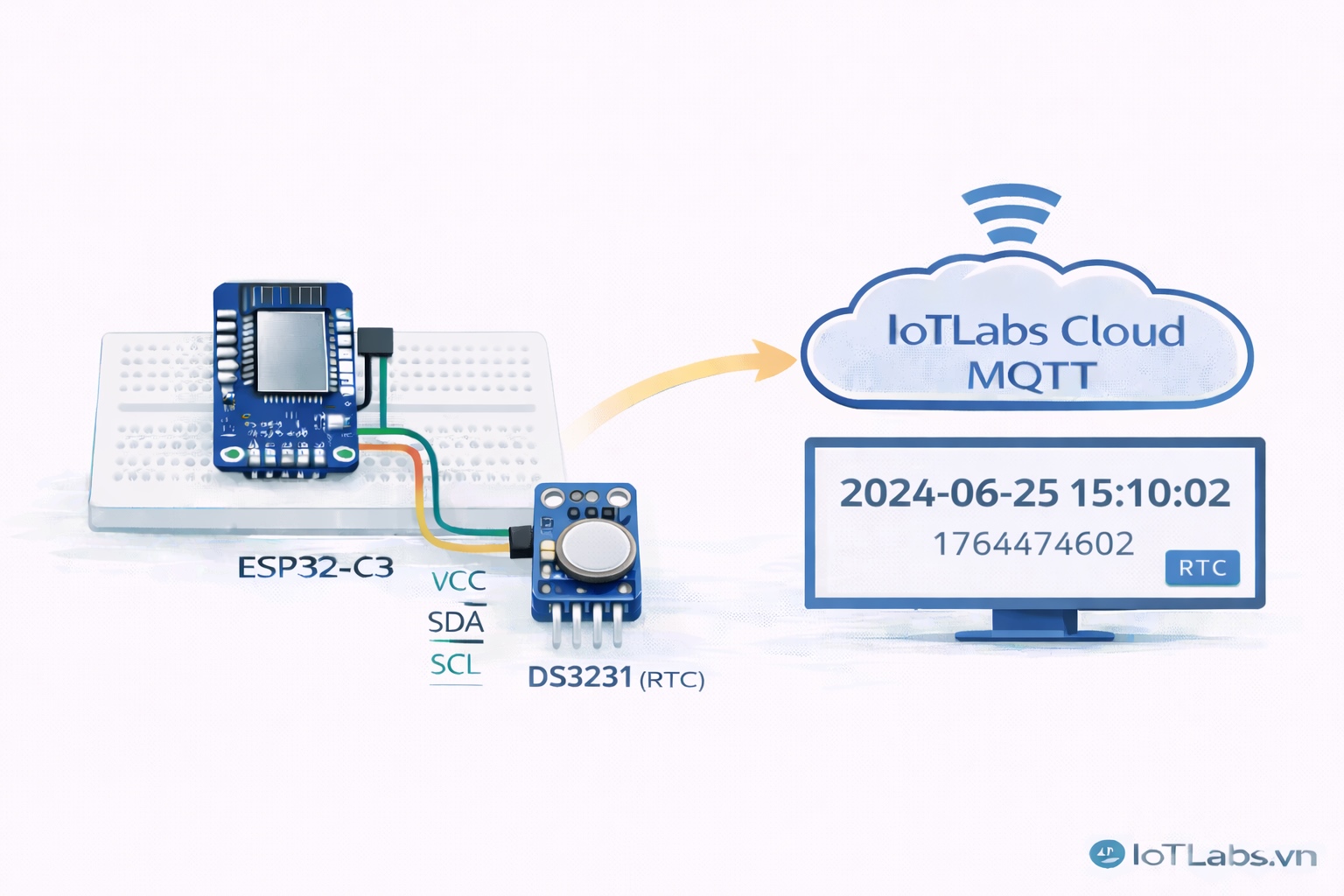
Series ESP32 & Cảm biến: Bài 17 – Đọc cảm biến BME280: đo nhiệt độ/độ ẩm/áp suất & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến BME280 qua I2C để đo nhiệt độ, độ ẩm và áp suất khí quyển, kèm ví dụ gửi dữ liệu realtime lên IoTLabs Cloud MQTT. Bài viết phù hợp cho trạm thời tiết IoT, giám sát môi trường và các hệ thống theo dõi dữ liệu dài hạn.
-
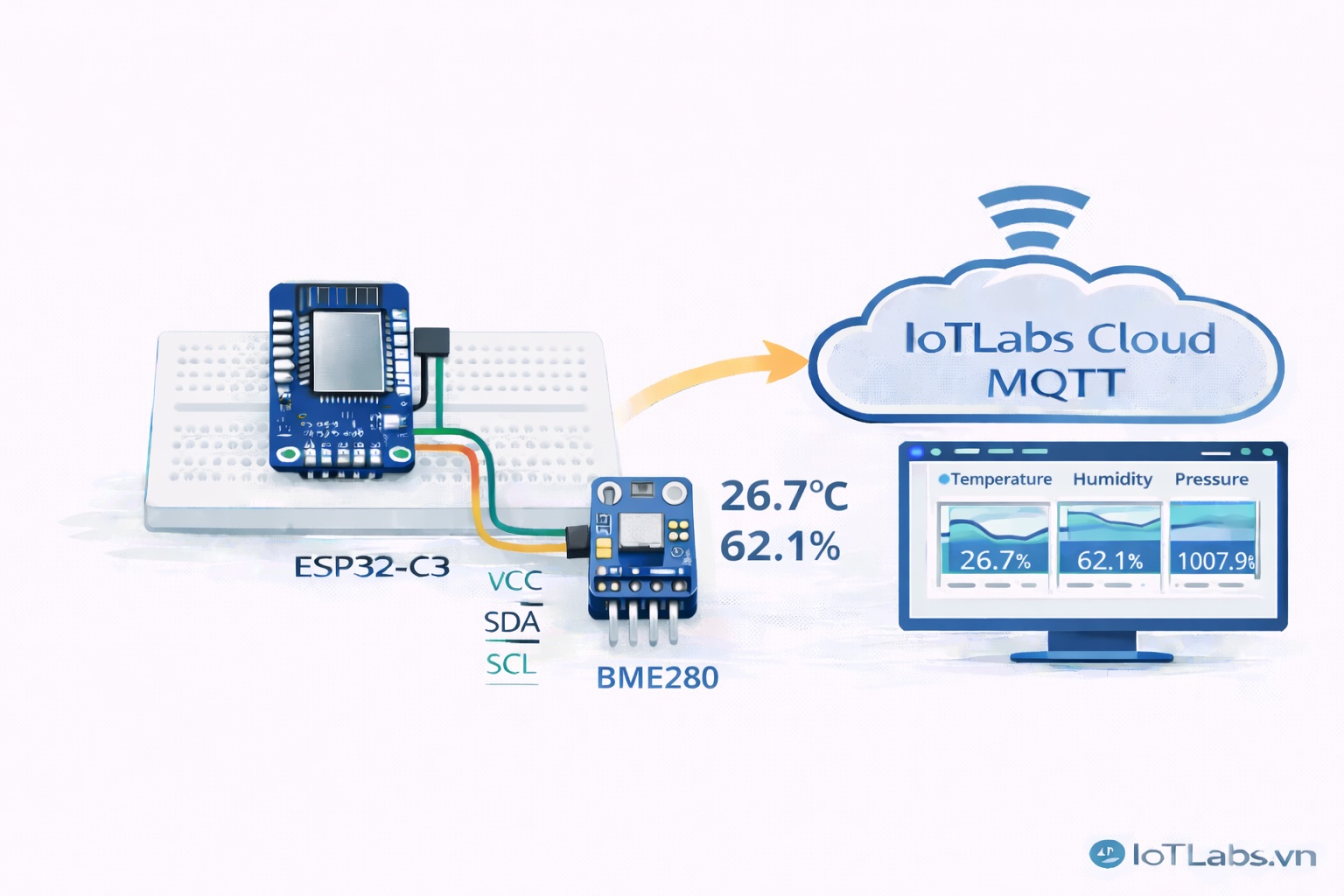
Series ESP32 & Cảm biến: Bài 16 – Hướng dẫn đọc cảm biến BMP280: đo áp suất/độ cao ước tính & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến BMP280 qua I2C để đo áp suất khí quyển và ước tính độ cao, kèm ví dụ gửi dữ liệu realtime lên IoTLabs Cloud MQTT. Bài viết phù hợp cho trạm thời tiết, giám sát môi trường và các dự án IoT cần theo dõi xu hướng áp suất…
-
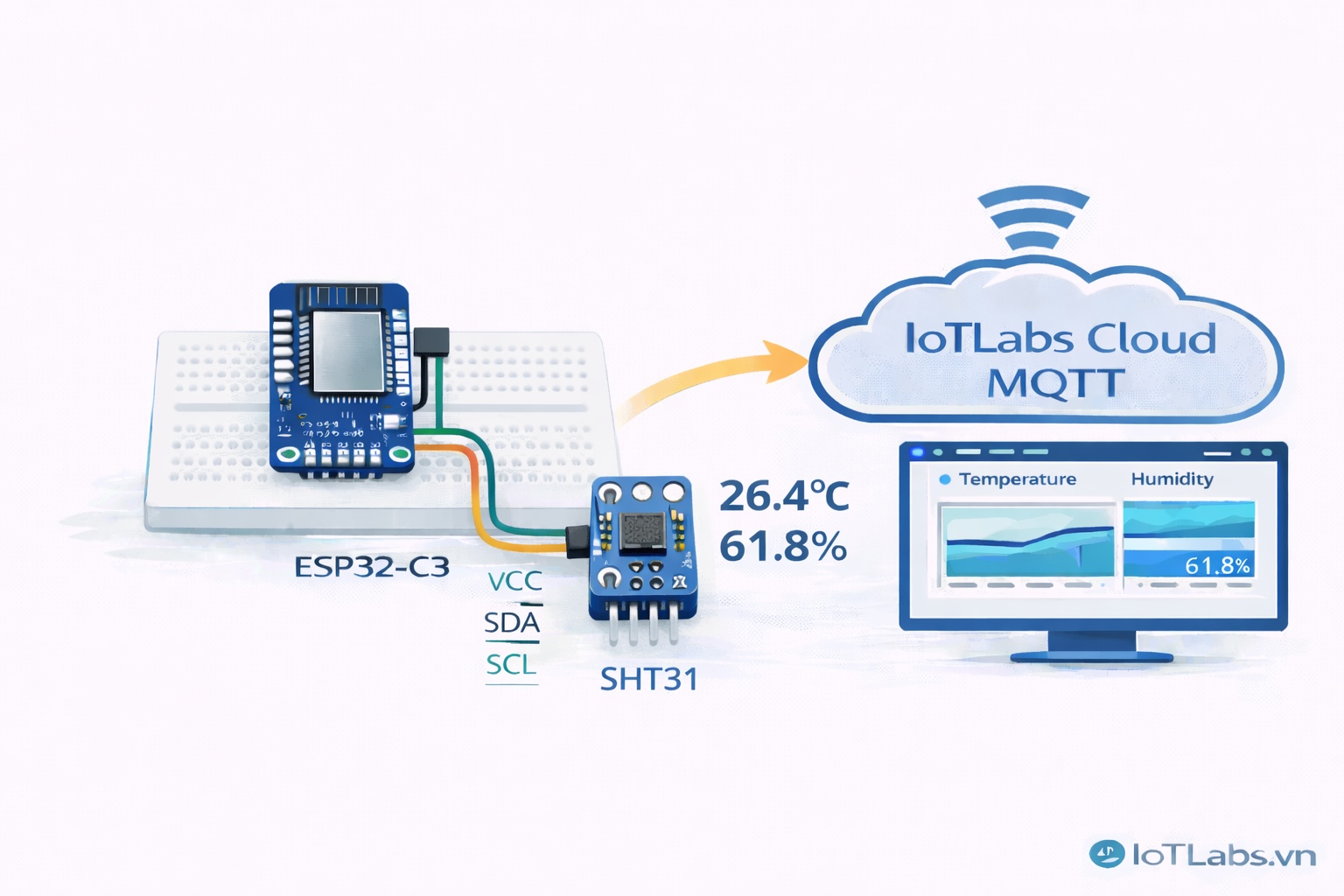
Series ESP32 & Cảm biến: Bài 15 – Hướng dẫn đọc cảm biến SHT31: đo nhiệt độ/độ ẩm chất lượng cao & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến SHT31 qua I2C để đo nhiệt độ và độ ẩm chất lượng cao, kèm ví dụ gửi dữ liệu realtime lên IoTLabs Cloud MQTT. Bài viết phù hợp cho các dự án IoT cần độ chính xác, ổn định lâu dài như trạm thời tiết, smart home và thiết…
-
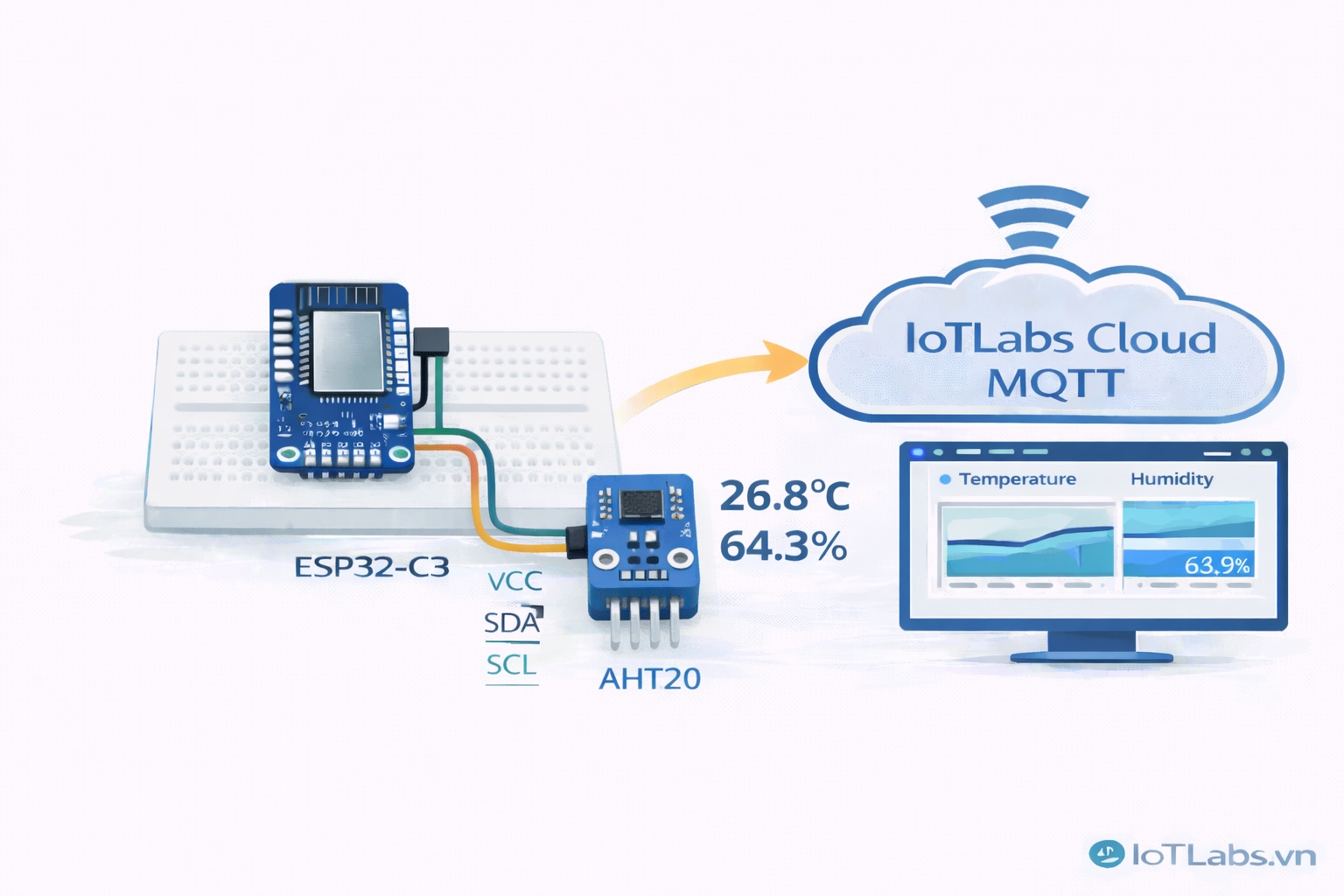
Series ESP32 & Cảm biến: Bài 14 – Đọc cảm biến AHT20 (I2C): đo nhiệt độ/độ ẩm ổn định & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến AHT20 để đo nhiệt độ và độ ẩm ổn định qua giao tiếp I2C, kèm ví dụ gửi dữ liệu realtime lên IoTLabs Cloud MQTT. Bài viết giúp bạn làm quen I2C sensor đúng chuẩn, đọc dữ liệu mượt, ít lỗi và phù hợp cho trạm thời tiết, smart…
-
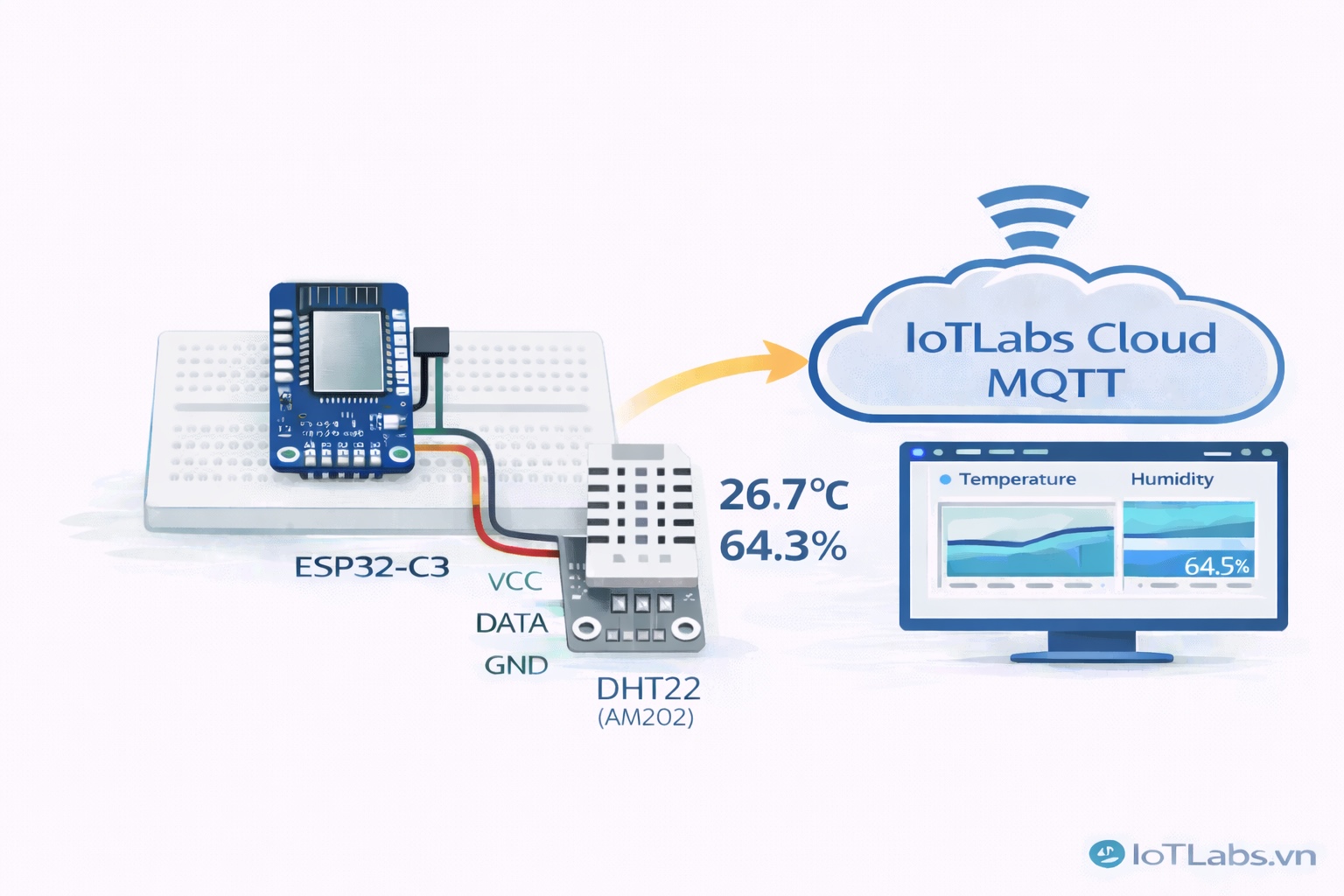
Series ESP32 & Cảm biến: Bài 13 – Đọc cảm biến DHT22 (AM2302): đo nhiệt độ/độ ẩm chính xác hơn & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến DHT22 (AM2302) để đo nhiệt độ và độ ẩm chính xác hơn DHT11, kèm ví dụ gửi dữ liệu realtime lên IoTLabs Cloud qua MQTT. Bài viết gồm code đọc local, chuẩn hoá payload đa metric (ts, temperature, humidity) và mẹo đo ổn định để dùng cho trạm thời…
-
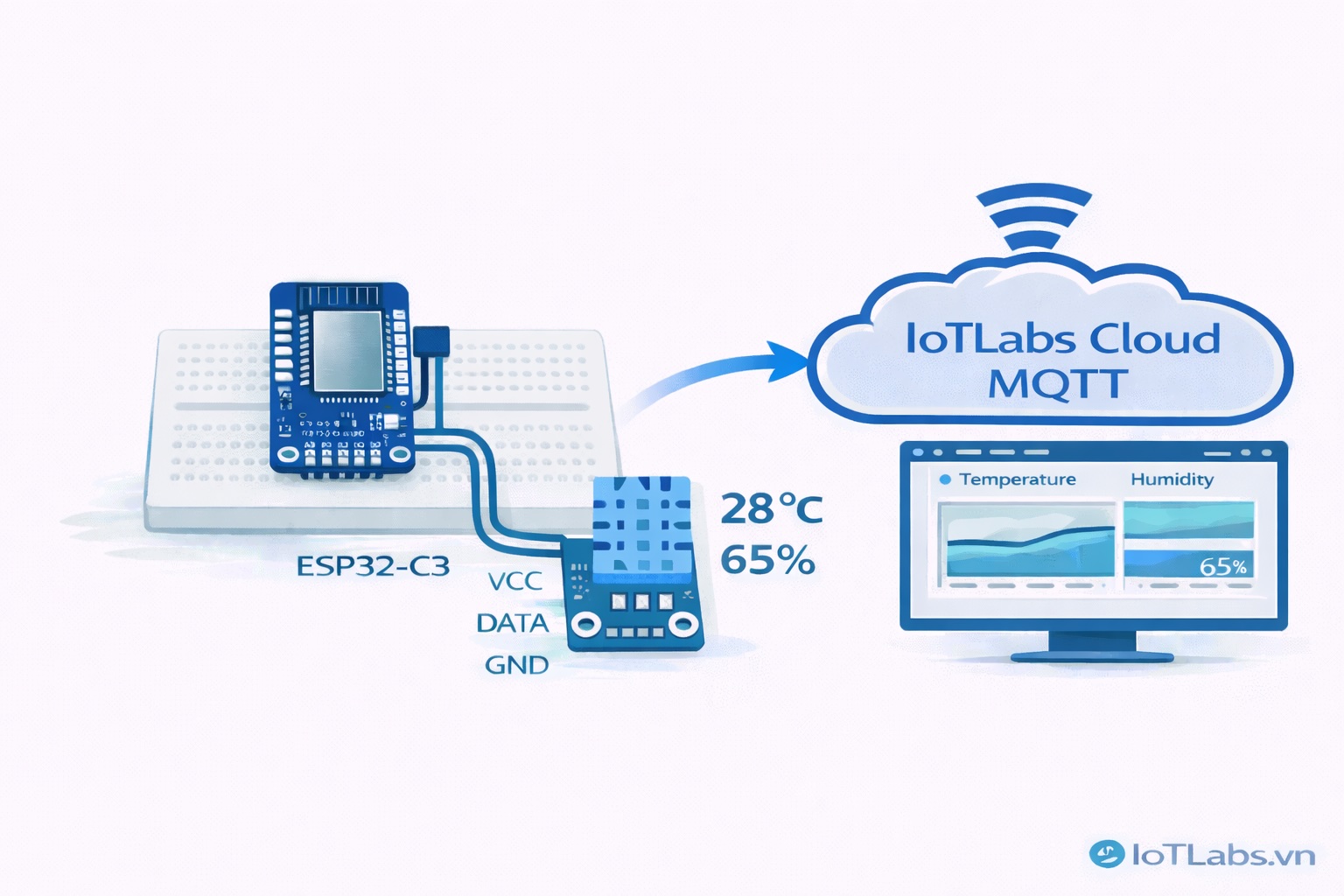
Series ESP32 & Cảm biến: Bài 12 – Đọc cảm biến DHT11: đo nhiệt độ/độ ẩm & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến DHT11 để đo nhiệt độ và độ ẩm, kèm ví dụ gửi dữ liệu realtime lên IoTLabs Cloud qua MQTT. Bài viết phù hợp cho người mới học IoT, giúp làm quen với cảm biến nhiệt độ/độ ẩm, cấu trúc payload đa metric và so sánh DHT11 với các…
-
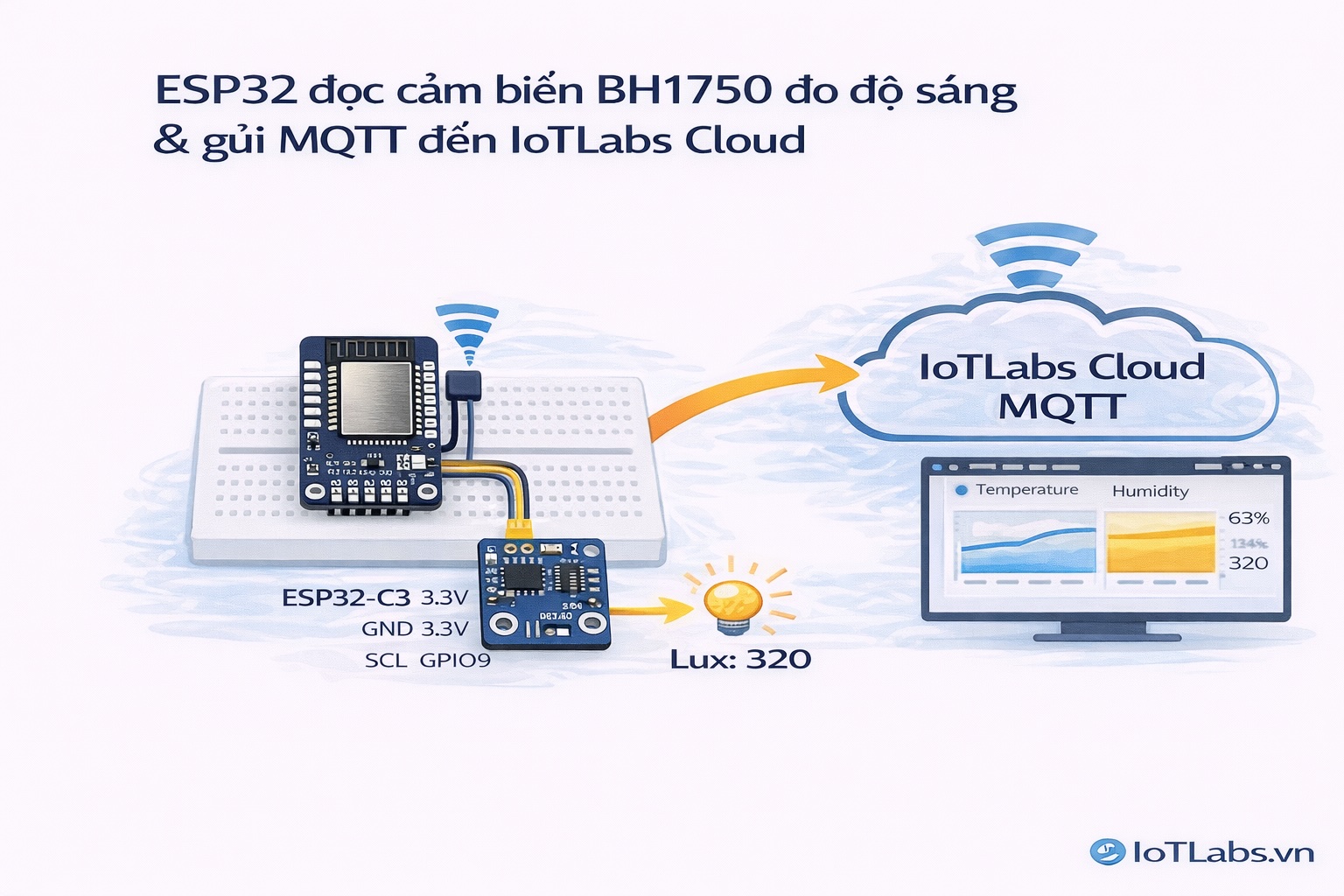
Series ESP32 & Cảm biến: Bài 11 – Hướng dẫn đọc cảm biến BH1750: đo độ sáng (Lux) & theo dõi realtime
Hướng dẫn ESP32 đọc cảm biến ánh sáng BH1750 để đo độ sáng môi trường theo đơn vị Lux và theo dõi realtime. Bài viết sử dụng giao tiếp I2C, hướng dẫn scan bus, đọc giá trị Lux chính xác và gửi dữ liệu lên IoTLabs Cloud MQTT. Phù hợp cho smart home, trạm thời…
-
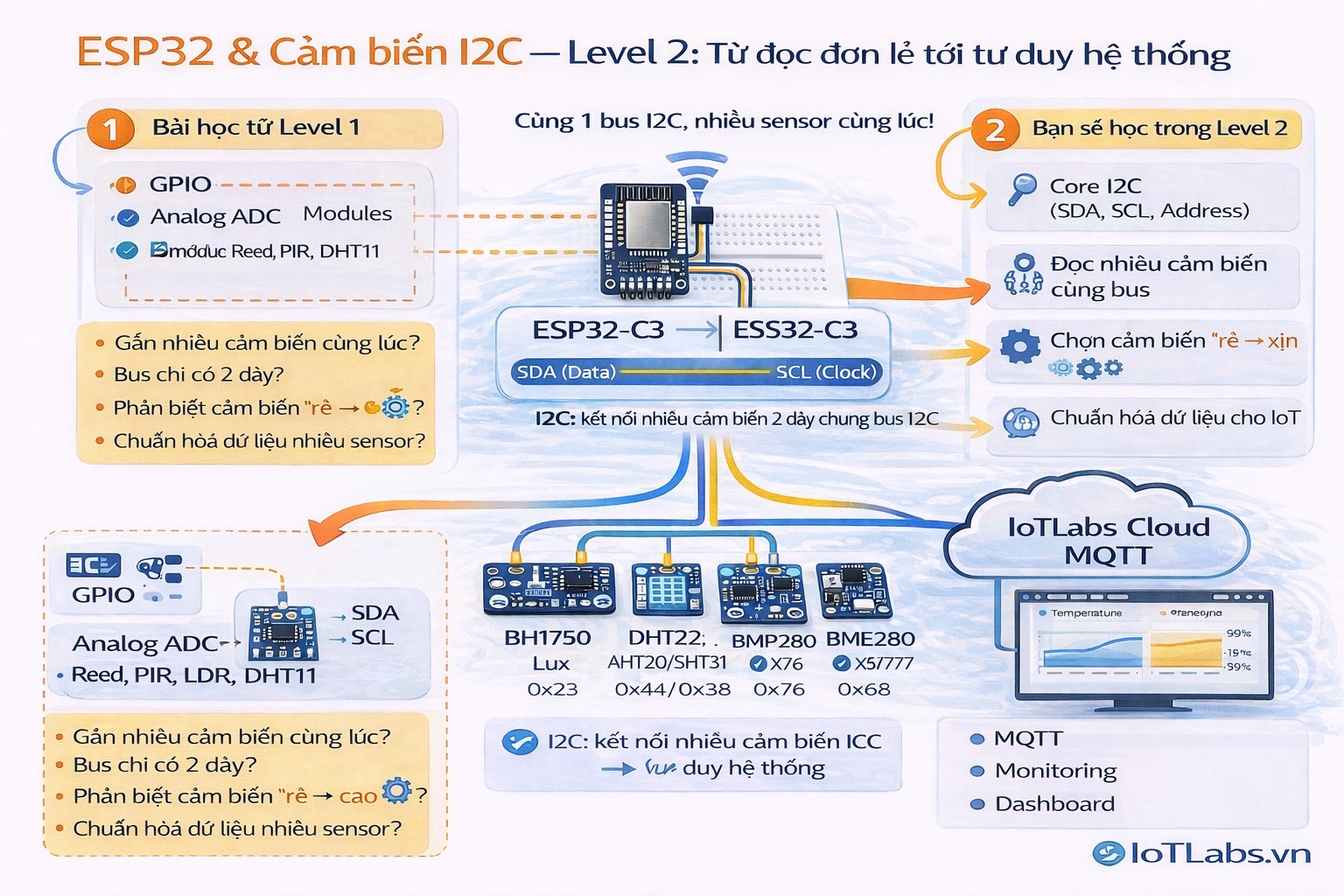
Series ESP32 & Cảm biến: Giới thiệu Level 2 – ESP32 & Cảm biến I2C: từ đọc đơn lẻ tới tư duy hệ thống
Giới thiệu Level 2 – ESP32 & Cảm biến I2C giúp bạn chuyển từ đọc cảm biến đơn lẻ sang tư duy hệ thống IoT. Bài viết giải thích vì sao I2C là giao thức quan trọng, cách dùng SDA/SCL, địa chỉ I2C và đọc nhiều cảm biến chung một bus. Level 2 tập trung…
-
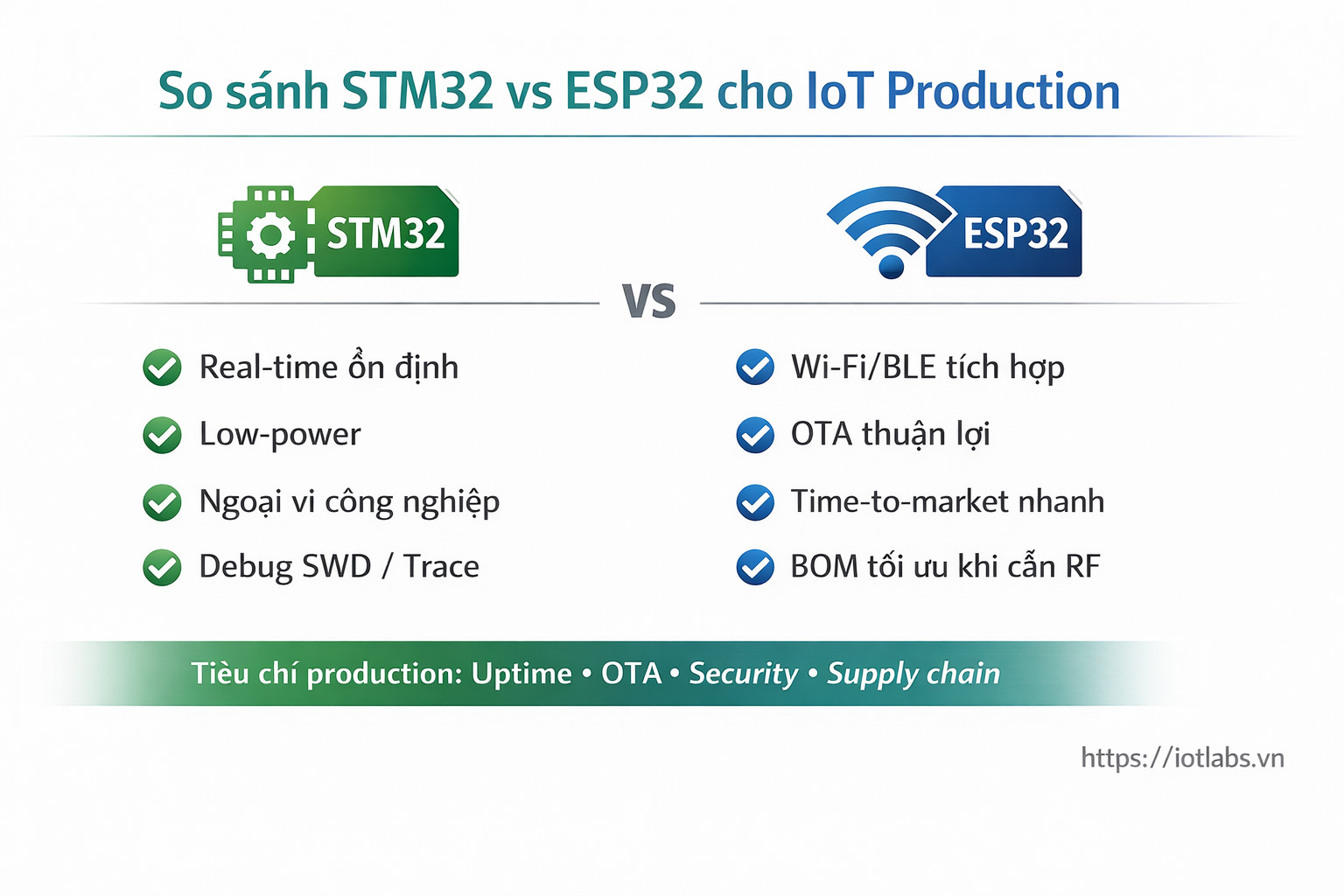
So sánh STM32 với ESP32: Chọn MCU nào cho dự án IoT Production?
So sánh STM32 và ESP32 cho dự án IoT trong môi trường sản xuất. Bài viết phân tích theo tiêu chí production: real-time, Wi-Fi/BLE, điện năng, OTA, bảo mật, khả năng debug và độ ổn định vận hành 24/7. Từ đó giúp bạn chọn đúng MCU cho node cảm biến, thiết bị điều khiển hoặc…